
Какое-то время назад я опубликовал статью про то, как я занимался созданием ДНК-секвенатора (прибора для чтения ДНК) путём реверс-инжиниринга микросхемы. Но со временем, пока я это делал (а делал я это очень долго) этот секвенатор устарел, вышел новый, и мой проект отчасти потерял смысл, поскольку себестоимость секвенирования на новом секвенаторе Oxford Nanopore оказалась ниже, чем та стоимость, к которой стремился я. Проект заглох. С другой стороны, произошли события, которые сместили мой основной интерес в область такой вещи, как георадар. Точнее вернули его туда.
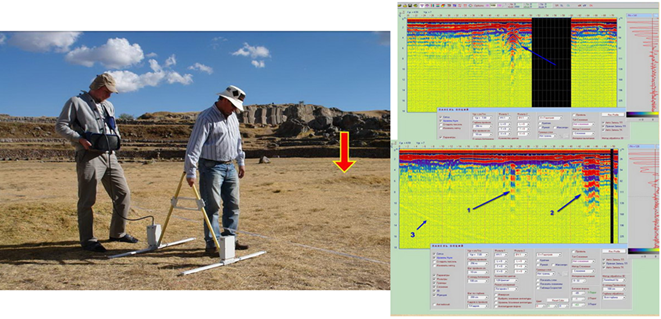
Лет 10 назад я наткнулся на ряд исследований, где применялось устройство, способное видеть, что находится под землёй — георадар. Неделю не мог оторваться, просмотрел огромное количество видеоматериалов, запомнилось название того прибора, который использовали исследователи – георадар «ЛОЗА». Ниже пример исследования Саксайуамана (Перу), на котором найдены подземные склепы, котлованы, лежащая на глубине плита, а также можно предположить наличие засыпанного когда-то дна чашеобразной формы.
Первой мыслью было: «Вау как круто! Так можно много всего интересного найти под землей. И нет других способов!» С этого начался мой интерес к данному прибору. Быстро выяснилось, что стоит он пару миллионов рублей, то есть далеко не каждому по карману. Я стал думать, как можно такой девайс сделать самому.
Из информации в интернете я составил представление о том, как устройство работает. Есть Передатчик и Приёмник. Передатчик посылает очень мощный, под несколько десятков киловольт, наносекундный электромагнитный импульс в глубь земли.
В тех местах, где меняется диэлектрическая проницаемость среды, то есть меняется тип почвы, её влажность, либо попадается инородное включение, воздушная полость, часть этого сигнала отражается обратно. Другая часть сигнала идёт дальше, глубже и отражается от какого-нибудь следующего слоя или объекта.
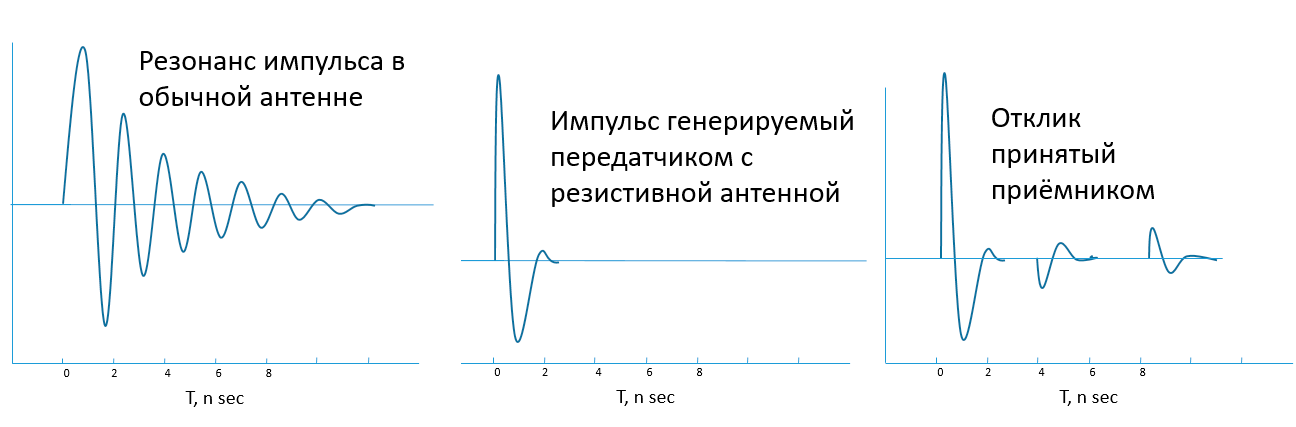
 Различные источники подчёркивали, что в георадарах используются так называемые резистивные (resist – сопротивляться) антенны. Это специальные антенны, у которых нет «звона» — они не резонируют. Обычная антенна (рис. 1) резонирует (начинает вынужденно колебаться) на собственной рабочей частоте. Её собственные колебания не дают ей качественно воспринять полезные сигналы, приходящие в это время. Импульсы, посылаемые при помощи резистивной антенны, отличаются от классического радиоимпульса отсутствием несущей частоты – получаются ассиметричные непродолжительные импульсы (рис. 2). Если импульс отражается от среды с большей диэлектрической проницаемостью, то он инвертируется (рис. 3). Я начал соображать, как сделать такие антенны.
Различные источники подчёркивали, что в георадарах используются так называемые резистивные (resist – сопротивляться) антенны. Это специальные антенны, у которых нет «звона» — они не резонируют. Обычная антенна (рис. 1) резонирует (начинает вынужденно колебаться) на собственной рабочей частоте. Её собственные колебания не дают ей качественно воспринять полезные сигналы, приходящие в это время. Импульсы, посылаемые при помощи резистивной антенны, отличаются от классического радиоимпульса отсутствием несущей частоты – получаются ассиметричные непродолжительные импульсы (рис. 2). Если импульс отражается от среды с большей диэлектрической проницаемостью, то он инвертируется (рис. 3). Я начал соображать, как сделать такие антенны.
Сам прибор также сулил вложения: «Этот девайс так дорого стоит, поскольку наверняка там стоят дорогостоящие сверхскоростные АЦП, позволяющие очень быстро и с высокой точностью измерять амплитуду сигнала – это уже несколько тысяч долларов; не говоря уже о мощном процессоре» — думал я.
Представьте себе, что мощные 10-киловольтные импульсы длительностью в 1 наносекунду следуют один за другим, многократно отражаясь. Основная задача в том, чтобы всю приходящую на Приёмник информацию быстро оцифровать (перевести из аналогового сигнала в «понятные» электронике, возможные для дальнейшей обработки символы – ноли и единицы), проанализировать и записать. А это гигабайты нолей и единиц в секунду непрерывным потоком.
«Реализую-ка я этот девайс на компараторах для начала. Сущие копейки и многократное удешевление» — решил я. Компаратор — это простейшая электронная схема, единственная задача которой, сравнить два входящих аналоговых сигнала. Она выдает на выходе 0 либо 1, в зависимости от того, какое из двух входящих напряжений больше. То есть компаратор – это 1-битный аналогово-цифровой преобразователь (АЦП), позволяющий записать двоичную форму сигнала. Однако, чтобы восстановить всю амплитуду одного возвращённого из земли импульса, нужны сотни таких сравнений с разными порогами компаратора. Моё сверхбюджетное решение не могло похвастаться скоростью и эффективностью.
В общем, я медленно обдумывал подходы к реализации прибора, пока не познакомился с Владимиром Зубовым и не занялся всерьёз реверс-инжинирингом ДНК-секвенатора, о чём впоследствии опубликовал на habr.com статью. Всё это время я продолжал с интересом следить за георадарными исследованиями, но времени на всё не хватало. Каково же было моё удивление, когда цепь случайных событий привела меня в ту же точку с совершенно с другой стороны.
 Три-четыре года назад я переехал жить под Троицк. Как раз тогда опубликовал статью про секвенатор, сидел разбирал входящие. Сам Jonathan Rothberg предложил мне start-up, но что-то не заладилось, было много других отнимающих время входящих — в общем был полностью погружён в последствия публикации. Неподалеку от нашего дома на поле были огромные антенны на мачтах (ну очень здоровые), частенько ходили туда с квадрокоптером. Я заинтересовался ими, стал гуглить «большие антенны, Троицк», наткнулся на сайт rk3b.ru c интригующим названием «Школьный Центр космической связи», позвонил туда и напросился в гости – сам радиолюбитель.
Три-четыре года назад я переехал жить под Троицк. Как раз тогда опубликовал статью про секвенатор, сидел разбирал входящие. Сам Jonathan Rothberg предложил мне start-up, но что-то не заладилось, было много других отнимающих время входящих — в общем был полностью погружён в последствия публикации. Неподалеку от нашего дома на поле были огромные антенны на мачтах (ну очень здоровые), частенько ходили туда с квадрокоптером. Я заинтересовался ими, стал гуглить «большие антенны, Троицк», наткнулся на сайт rk3b.ru c интригующим названием «Школьный Центр космической связи», позвонил туда и напросился в гости – сам радиолюбитель.
 Так я познакомился с Александром Николаевичем Зайцевым, заслуженнейшим товарищем, который этот Центр возглавлял. Оказалось, что он много лет занимался исследованиями магнитосферы Земли в ИЗМИРАН и заодно знал весь научный бомонд г. Троицка. Разговорились, я упомянул, в том числе, про свой интерес к георадарам. Александр Николаевич в свою очередь рассказал мне про антенны на поле. Они оказались чисто любительскими: известный радиолюбитель В. Н. Комаров, будучи при этом успешным предпринимателем, собрал команду энтузиастов КВ связи, на свои деньги создал суперцентр и такие антенны, что они стали самыми лучшими в эфире. Подтверждение тому – первые места в соревнованиях на первенство мира по КВ-связи.
Так я познакомился с Александром Николаевичем Зайцевым, заслуженнейшим товарищем, который этот Центр возглавлял. Оказалось, что он много лет занимался исследованиями магнитосферы Земли в ИЗМИРАН и заодно знал весь научный бомонд г. Троицка. Разговорились, я упомянул, в том числе, про свой интерес к георадарам. Александр Николаевич в свою очередь рассказал мне про антенны на поле. Они оказались чисто любительскими: известный радиолюбитель В. Н. Комаров, будучи при этом успешным предпринимателем, собрал команду энтузиастов КВ связи, на свои деньги создал суперцентр и такие антенны, что они стали самыми лучшими в эфире. Подтверждение тому – первые места в соревнованиях на первенство мира по КВ-связи.
А через некоторое время А. Зайцев познакомил меня с людьми из ООО «Компания ВНИИСМИ», которые (сюрприз!:) и занимались георадарами «ЛОЗА». Я встретился с П. Морозовым и А. Беркутом, её возглавлявшими. Они с радостью меня приняли, и мы во многом сошлись. Представьте себе моё изумление, когда они рассказали, что их устройство, георадар ЛОЗА, продаваемый по цене 25 000$ в базовой комплектации, работает на компараторах. И они как раз очень давно мечтали сделать устройство на аналого-цифровом преобразователе (АЦП), который позволил бы прибору работать быстро. И что попытки разные были, но никак успехом не увенчались. В общем, высказали полнейшую свою заинтересованность в разработке.
Впоследствии я получил полную информацию о том, как работает георадар «ЛОЗА». Там и правда не было ничего кроме компараторов и нескольких микросхем, лучшая из которых, впрочем, была самой передовой в семействе FPGA лет 20 назад. Становилась понятна главная жалоба ВНИИСМИ на свой прибор: надоело пальцем жать на кнопку. Ведь что такое работа на компараторах: для одного измерения (измерения в одной точке) нужно последовательно послать в землю 128 импульсов, что занимает от секунд до 2 минут, в зависимости от передатчика. То есть прибор работает по принципу: нажал на кнопку, постоял-подождал, передвинул прибор дальше по рулетке на 10 см. (действительно расстилается по земле рулетка, чтобы двигаться с шагом в 10 см.) и так далее. Представляете себе скорость такой работы? Кстати, блок управления либо компьютер подключаются к Передатчику проводом, поэтому для съёмки необходимы минимум 2 человека: тот, кто перемещает георадар, и оператор, идущий за ним на проводе.
 Также мне представилась возможность изучить несколько разных георадаров – серийных устройств и прототипов разных производителей и разработчиков.
Также мне представилась возможность изучить несколько разных георадаров – серийных устройств и прототипов разных производителей и разработчиков.
Например, вот эта большая тяжёлая коробка весит килограммов 5 или около того; внутри там стоит АЦП на 1800 Мегасемплов в секунду, каждая плата в отдельном корпусе и с отдельным экраном – в итоге много лишнего веса и большие габариты, что сделало прототип невозможным к использованию в принципе; он не работал.
Другой прототип был поудачнее, но проблема была в том, что его надо было очень долго настраивать; иногда он не включался, сбоил. Вообще, одна из проблем георадара — это необходимость работать в очень большом динамическом диапазоне. Импульс, который отправляется под землю, по мере прохождения сквозь неё очень быстро затухает. Чтобы увидеть и первый отклик этого импульса, и отклик, пришедший глубоко из-под земли, нужны усилители и АЦП, способные принимать и различать как очень сильные сигналы, так и очень-очень слабые. Вот эта амплитуда и называется динамическим диапазоном. В данном прототипе для этого использовался двухканальный усилитель — один канал усилителя работал с сильными сигналами, а другой со слабыми. То есть было 2 канала оцифровки, которые, к слову, никак не удавалось свести воедино. Регулируя усиление, прибор можно было настроить на какую-то глубину и в ней он что-то видел. Но не выше, не ниже заданного уровня он не видел, пока его не перенастроишь на иные параметры. Кроме того, у прототипа была очень большая чувствительность к помехам.

Итак, я начал проектировать собственное высокоскоростное, мощное устройство. Работа предстояла громадная, но были и хорошие новости: часть работы была уже проделана — за основу я взял ту электронику, которую (та-дам!..:) я разработал для ДНК-секвенатора.
Работа над георадаром и комплексом программного обеспечения заняла около года. Я добился не только полной автоматизации, высоких скоростей, возможности управлять георадаром с любого устройства, мне удалось создать, по сути, универсальное ядро под любой высокотехнологичный проект: система на модуле (Zturn) → система на кристале Zynq → связка работы FPGA+CPU+Linux+Django+WebSockets+Javascript… Впрочем, оставлю интригу. Чтобы не утомлять читателя, выношу техническую часть в отдельную статью.
 Разработанный мною прибор представляет из себя 2 устройства – Передатчик и Приёмник, у каждого своя антенна. Сейчас размеры устройств 22,2 х 14,6 х 5,5 см., в следующей партии планируется ещё уменьшить габариты. Для исследований на небольшой глубине применяются стандартные метровые антенны. В зависимости от длины и мощности антенн глубина зондирования на благоприятных почвах может достигать нескольких сотен метров. Для перемещения георадара может быть использована ручная переноска, платформа на колёсиках, складные/гибкие антенны глубинного зондирования с посадочными местами под Приёмник и Передатчик; под спец. задачи могут быть созданы иные средства перемещения (например, надувные – для исследования подводных объектов).
Разработанный мною прибор представляет из себя 2 устройства – Передатчик и Приёмник, у каждого своя антенна. Сейчас размеры устройств 22,2 х 14,6 х 5,5 см., в следующей партии планируется ещё уменьшить габариты. Для исследований на небольшой глубине применяются стандартные метровые антенны. В зависимости от длины и мощности антенн глубина зондирования на благоприятных почвах может достигать нескольких сотен метров. Для перемещения георадара может быть использована ручная переноска, платформа на колёсиках, складные/гибкие антенны глубинного зондирования с посадочными местами под Приёмник и Передатчик; под спец. задачи могут быть созданы иные средства перемещения (например, надувные – для исследования подводных объектов).
Платформа с георадаром может быть прикреплена к транспортному средству, георадар способен производить съёмку в автоматическом режиме на скорости до 40 км/ч (то, что мы протестировали, вероятно и больше). Регистрация перемещения прибора осуществляется при помощи датчика колеса и GPS. Все процессы автоматизированы, прибор лёгок в управлении, не требует дополнительного оператора, со съёмкой справится и один человек. Приоритеты: мощность, компактность, лёгкость, пассивная охлаждаемость, возможность комплектации с различными средствами перемещения и антеннами разной мощности. Эти две небольшие коробочки – могут стать сердцем георадарного комплекса любой мощности. Дальше скучное, спецификация:
• Частотный диапазон (МГц) 1-300
• Частота следования зондирующих импульсов до 1000 импульсов в секунду (при максимальной частоте импульсов при движении со скоростью 36 км/ч интервал измерений составит 1 мм)
• Тип импульса: широкополосный видеоимпульс, без несущей частоты
• Мощность в импульсе 5 МВт
• Длительность импульса 1 нсек
• Приёмник: частота дискретизации 1GSPS (1нсек)
• Режим регистрации АЦП 16 бит
• Усилитель логарифмический
• Динамический диапазон изменяемый до 120 Дб
• Временные развертки (количество отсчетов в одном сигнале зондирования) 16000
• Автоматическая синхронизация с передатчиком
• Встроенная память 64 Гбайт
• Дополнительные датчики: барометр, акселерометр (измерение угла наклона прибора), GPS, энкодер колеса
• Управление кнопками на приборе или через wifi с любого устройства. Есть web интерфейс, программа для PC
• Время работы от встроенной батареи 4 часа, возможно присоединение внешнего аккумуляторного блока (+12 часов)
• Встроенный генератор тестового сигнала
• Габаритные размеры 222 х 146 х 55 mm (х 2)

Стандартные антенны имеют центральную частоту 100Mhz (1,5м), 200MHz (1м). Существуют также низкочастотные антенны для глубокого зондирования 10MHz (10м), 25Mhz (6м), 50Mhz (3м) (в скобках размер антенн, а не глубина зондирования). Увеличивая длину антенн – увеличиваем глубину зондирования. Важно отметить, что глубина зондирования зависит также от мощности передатчика и от плотности/свойств грунтов. Таким образом, всегда можно увеличить антенны, поэтому глубина зондирования может достигать 500 м.
Георадар готов к работе сразу — после нажатия кнопки «ON» георадар начнёт вести съёмку и записывать всё во внутреннюю память. Он может работать абсолютно автономно, без подключения к нему оператора.
Устройство раздаёт wi-fi, подключиться к нему можно с любого компьютера, планшета, телефона через web браузер. Вы попадаете в программу, позволяющую управлять устройством, менять настройки, видеть текущий трек. В верхней строке интерфейса различные статусы, позволяющие понять, что происходит в данный момент: напряжение аккумулятора, температура на процессоре, время, время работы, GPS данные. Ниже вкладки и кнопки настройки триггеров, offsetов, логарифмической шкалы, зума, режимы работы.
Прибор может производить одно измерение по нажатии кнопки, либо по времени, например, каждые 0,3 секунды, либо измерения могут быть синхронизированы с работой колеса, например на каждую четверть оборота колеса происходит срабатывание, то есть Передатчик посылает импульс, а Приёмник его принимает и записывает. Последний режим очень удобен, так как позволяет привязать платформу с георадаром к машине, например, и производить равномерные измерения независимо от скорости движения.
 Первый запуск был произведён совместно с представителями ВНИИСМИ на строящейся асфальтной дороге на юго-западе Москвы. Вот так выглядела инсталляция моего прибора: 2 антенны на платформе максимально близко к земле, белая коробочка — это Передатчик, чёрная — Приёмник.
Первый запуск был произведён совместно с представителями ВНИИСМИ на строящейся асфальтной дороге на юго-западе Москвы. Вот так выглядела инсталляция моего прибора: 2 антенны на платформе максимально близко к земле, белая коробочка — это Передатчик, чёрная — Приёмник.
 Заранее было выбрано место, где в разных точках под землей лежали коммуникации. По плану было определить такие точки сначала прибором Лоза, а затем тоже самое место посмотреть моим прибором. Пока ВНИИСМИ свой прибор настраивали, я с пол оборота завёлся и проехался, и всё увиделось. Вот первая картинка, полученная с моего прибора. Мы подошли к рабочим, которые в это время занимались там строительством дороги и сверили результаты наших съёмок с картами коммуникаций, которые были у них – всё совпало, там действительно были пластиковые трубы 200-го диаметра на глубине 2 м. Это был успех.
Заранее было выбрано место, где в разных точках под землей лежали коммуникации. По плану было определить такие точки сначала прибором Лоза, а затем тоже самое место посмотреть моим прибором. Пока ВНИИСМИ свой прибор настраивали, я с пол оборота завёлся и проехался, и всё увиделось. Вот первая картинка, полученная с моего прибора. Мы подошли к рабочим, которые в это время занимались там строительством дороги и сверили результаты наших съёмок с картами коммуникаций, которые были у них – всё совпало, там действительно были пластиковые трубы 200-го диаметра на глубине 2 м. Это был успех.

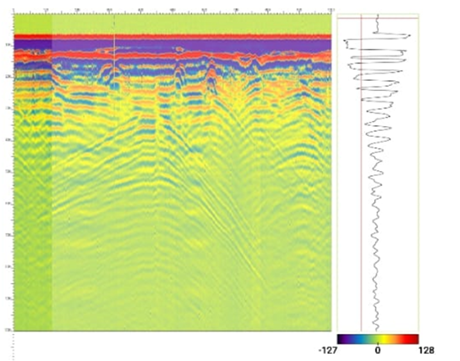
На картинке ниже кусок той же съёмки строящейся дороги. Справа вы видите извивающийся столбик — это осциллограмма импульса. Маленькая пика вверху — это тот импульс, который сгенерировал Передатчик, а всё что ниже, это то, что приходит на Приёмник со всех сторон, но в основном из под земли. Большая цветная картина рядом с осциллограммой импульса — это набор таких столбцов, то есть каждый пиксельный столб это 1 импульс, только здесь амплитуда переведена в цвет. Красная полоса в верхней части цветной картинки — это уровень земли. Дальше импульс уходит в землю, и ниже мы видим всё, что отразившись прилетело на Приёмник. Небольшие сине-красные бугорки чуть ниже второй красной полосы и есть пересечение диаграмм направленности антенн с точечными объектами в виде труб. То есть, в тех местах, где по ходу движения прибора мы пересекаем трубы, трубы дают вот такой вот радио-образ, причём в некоторых местах видно две трубы, если увеличить.
 Также здесь видны большие размытые параболы, которые идут до конца картинки вниз — это отражение по воздушному каналу от различных объектов, в данном случае линий электропередачи, которые стояли рядом. На мой взгляд, это большая проблема, которая не нашла пока решения в известных мне разработках. Информация об отражениях вне исследуемой среды явно лишняя, она отвлекает внимание и мешает интерпретации полезного сигнала, поскольку постоянно надо анализировать окружение и решать из-под земли пришло это отражение или по воздуху. Поэтому в планах программно-аппаратными средствами минимизировать отражения по воздуху.
Также здесь видны большие размытые параболы, которые идут до конца картинки вниз — это отражение по воздушному каналу от различных объектов, в данном случае линий электропередачи, которые стояли рядом. На мой взгляд, это большая проблема, которая не нашла пока решения в известных мне разработках. Информация об отражениях вне исследуемой среды явно лишняя, она отвлекает внимание и мешает интерпретации полезного сигнала, поскольку постоянно надо анализировать окружение и решать из-под земли пришло это отражение или по воздуху. Поэтому в планах программно-аппаратными средствами минимизировать отражения по воздуху.
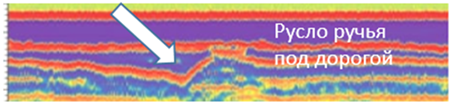 Вот на этой картинке — ручей, закопанный при строительстве дороги; видно русло на глубине порядка 2 метров. Ниже на этом участке тоже были большие параболы — отражение от столбов освещения, вдоль дороги.
Вот на этой картинке — ручей, закопанный при строительстве дороги; видно русло на глубине порядка 2 метров. Ниже на этом участке тоже были большие параболы — отражение от столбов освещения, вдоль дороги.
У меня рядом с домом есть река Незнайка с очень интересной геологией, где всё как в учебнике: есть старое русло, четвертичные отложения, аллювий, речные террасы. Там тоже мы ходили с ребятами из ВНИИСМИ испытывали, сравнивали работу разных георадаров. Здесь в конце видно старое русло реки, а большие зелёные параболы — это отражение забора соседнего посёлка на металлических столбах.
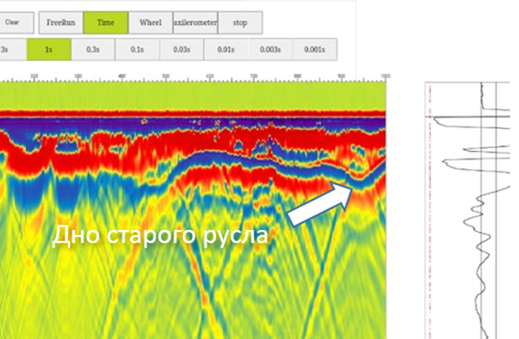 Как видите, только человек уже знакомый с принципами интерпретации таких картинок, сходу определит, что это русло реки, а это отражение от забора. Таким образом, сама форма вывода данных существенно ограничивает круг людей, способных легко начать работать с георадарами. И здесь, по-моему, очень интересная задача стоит — перевода этих данных в понимаемую любым пользователем картинку. Выполнена эта задача может быть с применением искусственного интеллекта (нейросети), который можно обучить маркировать, обозначать реальные контуры объектов и предполагать их назначение и свойства. Также решить проблему нечитабельности данных помогут объёмные построения, но об этом дальше.
Как видите, только человек уже знакомый с принципами интерпретации таких картинок, сходу определит, что это русло реки, а это отражение от забора. Таким образом, сама форма вывода данных существенно ограничивает круг людей, способных легко начать работать с георадарами. И здесь, по-моему, очень интересная задача стоит — перевода этих данных в понимаемую любым пользователем картинку. Выполнена эта задача может быть с применением искусственного интеллекта (нейросети), который можно обучить маркировать, обозначать реальные контуры объектов и предполагать их назначение и свойства. Также решить проблему нечитабельности данных помогут объёмные построения, но об этом дальше.
На картинке ниже очень интересный рельеф (съёмка произведена 22.07.2020 в Ивановской области, д. Калинкино): видна какая-то продолговатая структура — скорее всего это слой песка либо ещё какого-то менее плотного, чем превалирующие в наших краях суглинки, грунта. У меня есть мысль полностью автоматизировать идентификацию слоёв. Как мы определили выше, волна отражается от тех мест, где происходит изменение диэлектрической проницаемости среды. Мы можем померять скорость прохождения импульса на том или ином ярусе этой картинки и предположить состав среды и/или степень её влажности.

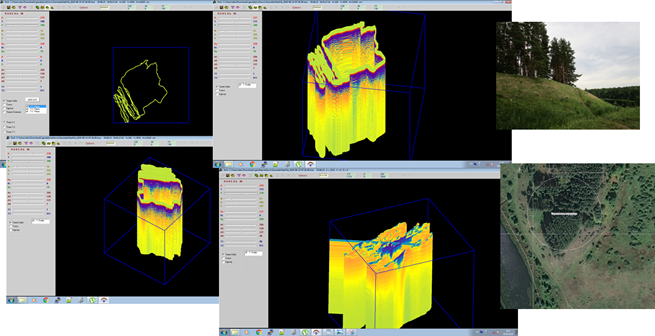
В конце лета мне удалось съездить в археологическую экспедицию под Рязанью близ села Терехово Шиловского района на место стоянки/поселения пятого века. Там на схождении двух рек есть холм, поросший деревьями – остались многочисленные свидетельства, что в пятом веке там было Городище. Стали ходить там с георадаром — на первом рисунке наш трек по GPS. В центре очень густо росли деревья, мы смогли пройти по периметру, дальше деревьев было меньше и мы всё довольно плотно исходили. У меня была возможность воспользоваться программой, которая анонсировалась, как программа позволяющая строить 3D модель из линейных проходок. Такого результата ждали от меня археологи — «построим и увидим наглядно что где зарыто». Лучше всего подобные построения делать из хорошо (плотно) исхоженных участков. Я загрузил в программу область с самыми плотными проходами и вошёл в режим 3D – программа выстроила поле из цветовых столбиков, которые можно было «вытягивать» вниз и вверх, меняя настройки, больше никаких возможностей я не увидел – проконсультировавшись выяснил, что программа строит лишь псевдо 3D.
Представим, что у нас есть некие столбцы, которые нам известны, где георадар сверху проехал, и мы знаем, что вертикально вниз в этой точке находится. Следующая задача, это достроить недостающие столбцы аппроксимацией, что и сделала программа. Но сделала она это банально решёткой по 2 осям. В результате такого построения возникают различные артефакты – крестообразные, из горизонтальных и вертикальных линий. Если мы берём какой-то срез 3D плоскости, мы имеем цветную картинку из среза столбиков, которые программа просто вверх либо вниз вытягивает в зависимости от амплитуды сигнала.

Настоящее 3D построение несколько сложнее — из физически отснятых на разной глубине точек нам надо выявить некие плоскости, переходные плоскости из одного в другое и дальше с помощью пользовательского интерфейса иметь возможность выбирать отдельные плоскости, которые нам необходимо отобразить.
Построение объёмной модели — это вообще отдельная очень интересная задача. Сейчас обдумываю идею использовать одну антенну с Передатчиком и 2 разнесённые друг от друга антенны с Приёмниками, то есть 2 Приёмника. Получается своего рода фазированная антенная решетка. По времени прохождения сигнала, точнее по разнице во времени приёма его первым и вторым Приемником, можно определить точное место, где этот сигнал отразился. Таким образом мы можем за одно измерение, измерение одиночного импульса, сразу выстраивать картинку в 2D плоскости. В обычной радиолокации используются несущие частоты, преобразования Фурье, построения по синусам и косинусам. В данном же случае используется несколько отличная математика: на основании данных об отражении одиночного наносекундного импульса мы делаем свертку и дальше высчитываем откуда этот импульс пришёл с какой вероятностью. Эта идея сейчас в стадии написания софта, который позволит сразу в процессе прохода моделировать 3D картинку, а также измерять скорость прохождения импульса в слоях, что позволит сразу предполагать состав и качество сред.
Где может быть использован георадар?
Самые верхние под поверхностью земли слои называют «культурным слоем» — это археология, прекрасно видны отдельные объекты, фундаменты строений, видны даже копаные и засыпанные когда-то ямы. Так, есть очень интересная задача связанная, например, с пустыней Сахара. Сахара расширяется, и многие археологи сходятся во мнении, что под её песками погребены города и строения. Во времена Египта там была саванна, текли реки, жили животные. Георадар может просканировать всё до грунта, и найти там строения и поселения. Это собственно единственный прибор, который способен это сделать.
Кстати, глубина сканирования зависит от плотности и типа грунта, его минерализации, влажности. Песок — это тот грунт, в котором георадар видит наиболее глубоко. Вторая такая очень проницаемая для георадара среда — это лёд. Так, георадар может быть применён и для подповерхностного зондирования водных объектов. В солёной воде глубина зондирования будет меньше, в пресной воде больше, и самое глубокое зондирование может быть произведено во льдах.
Еще одно применение георадара — это поиск подземных коммуникаций, труб, ходов, тоннелей. Можно очень эффективно контролировать качество дорожного строительства — какой толщины песчаную подложку положили, равномерно ли уложен асфальт. Так же можно проверять состояние фундаментов и стен строений. Можно мониторить состояние дорожного полотна во время эксплуатации, чтобы вовремя предпринять меры в случае подмыва дороги, образования карстовых полостей, пока это еще не привело к провалу. Подмывы случаются и под фундаментами зданий, сооружений. Так, причиной разлива нефти в Норильске было то, что был подмыт фундамент нефтехранилища. Регулярные проверки подобных объектов, помогли бы успешно подобные катастрофы предотвращать.

Геология. При георадарной съёмке прекрасно видно границы рек, выходы известняков, где какие слои пород находятся, видны кимберлитовые трубки, морены. По косвенным признакам можно определять подземные воды. Так, вода просачивается вниз пока не встретится какой-то слой, через который она просочиться не может, и скапливается на границе слоёв в низине. Также можно прогнозировать и предотвращать сходы селей, оползни. Георадар может быть полезен в разведке полезных ископаемых, в том числе может использоваться при бурении.
В декабре 2020 года базовая версия прибора успешно прошла испытания и была сертифицирована. Георадар получил Название GEORA.
Готовится к выпуску первая небольшая партия. Цель — начать получать более широкий опыт практического использования и на основании этого опыта выявить возможности по улучшению удобства пользования, функциональности. Вторая задача — создание программного обеспечения следующего поколения, которое сделает наглядным и удобным анализ данных даже для неподготовленного пользователя.
К широкому выпуску планируются 2 версии: для частного использования и для коммерческого. Есть возможность кастомизировать оборудование и софт под любые задачи.
Глобальная цель — сделать георадар вещью более массовой, доступной по цене человеку, интересующемуся историей, археологией. Доступной индивидуальным предпринимателям, которые работают в сфере проектирования, строительства, экспертизы, исследования недр. Широкое распространение прибора сформирует сообщество пользователей. В планах — создание централизованной базы данных измерений. Чтобы любой, при желании, мог отправлять данные сканирования на сервер, делиться ими на возмездной или безвозмездной основе. Кроме того, больший массив данных позволит эффективнее обучить нейросеть интерпретации, визуализации результатов сканирования.
Сейчас готовится к публикации вторая часть статьи с подробным описанием технической части. На сегодня всё, если интересно — пишите, почта sokolov.labs@gmail.com. Всем пока, спасибо за внимание!
Лет 10 назад я наткнулся на ряд исследований, где применялось устройство, способное видеть, что находится под землёй — георадар. Неделю не мог оторваться, просмотрел огромное количество видеоматериалов, запомнилось название того прибора, который использовали исследователи – георадар «ЛОЗА». Ниже пример исследования Саксайуамана (Перу), на котором найдены подземные склепы, котлованы, лежащая на глубине плита, а также можно предположить наличие засыпанного когда-то дна чашеобразной формы.
Первой мыслью было: «Вау как круто! Так можно много всего интересного найти под землей. И нет других способов!» С этого начался мой интерес к данному прибору. Быстро выяснилось, что стоит он пару миллионов рублей, то есть далеко не каждому по карману. Я стал думать, как можно такой девайс сделать самому.
Из информации в интернете я составил представление о том, как устройство работает. Есть Передатчик и Приёмник. Передатчик посылает очень мощный, под несколько десятков киловольт, наносекундный электромагнитный импульс в глубь земли.
В тех местах, где меняется диэлектрическая проницаемость среды, то есть меняется тип почвы, её влажность, либо попадается инородное включение, воздушная полость, часть этого сигнала отражается обратно. Другая часть сигнала идёт дальше, глубже и отражается от какого-нибудь следующего слоя или объекта.
Различные источники подчёркивали, что в георадарах используются так называемые резистивные (resist – сопротивляться) антенны. Это специальные антенны, у которых нет «звона» — они не резонируют. Обычная антенна (рис. 1) резонирует (начинает вынужденно колебаться) на собственной рабочей частоте. Её собственные колебания не дают ей качественно воспринять полезные сигналы, приходящие в это время. Импульсы, посылаемые при помощи резистивной антенны, отличаются от классического радиоимпульса отсутствием несущей частоты – получаются ассиметричные непродолжительные импульсы (рис. 2). Если импульс отражается от среды с большей диэлектрической проницаемостью, то он инвертируется (рис. 3). Я начал соображать, как сделать такие антенны.Сам прибор также сулил вложения: «Этот девайс так дорого стоит, поскольку наверняка там стоят дорогостоящие сверхскоростные АЦП, позволяющие очень быстро и с высокой точностью измерять амплитуду сигнала – это уже несколько тысяч долларов; не говоря уже о мощном процессоре» — думал я.
Представьте себе, что мощные 10-киловольтные импульсы длительностью в 1 наносекунду следуют один за другим, многократно отражаясь. Основная задача в том, чтобы всю приходящую на Приёмник информацию быстро оцифровать (перевести из аналогового сигнала в «понятные» электронике, возможные для дальнейшей обработки символы – ноли и единицы), проанализировать и записать. А это гигабайты нолей и единиц в секунду непрерывным потоком.
«Реализую-ка я этот девайс на компараторах для начала. Сущие копейки и многократное удешевление» — решил я. Компаратор — это простейшая электронная схема, единственная задача которой, сравнить два входящих аналоговых сигнала. Она выдает на выходе 0 либо 1, в зависимости от того, какое из двух входящих напряжений больше. То есть компаратор – это 1-битный аналогово-цифровой преобразователь (АЦП), позволяющий записать двоичную форму сигнала. Однако, чтобы восстановить всю амплитуду одного возвращённого из земли импульса, нужны сотни таких сравнений с разными порогами компаратора. Моё сверхбюджетное решение не могло похвастаться скоростью и эффективностью.
В общем, я медленно обдумывал подходы к реализации прибора, пока не познакомился с Владимиром Зубовым и не занялся всерьёз реверс-инжинирингом ДНК-секвенатора, о чём впоследствии опубликовал на habr.com статью. Всё это время я продолжал с интересом следить за георадарными исследованиями, но времени на всё не хватало. Каково же было моё удивление, когда цепь случайных событий привела меня в ту же точку с совершенно с другой стороны.
Три-четыре года назад я переехал жить под Троицк. Как раз тогда опубликовал статью про секвенатор, сидел разбирал входящие. Сам Jonathan Rothberg предложил мне start-up, но что-то не заладилось, было много других отнимающих время входящих — в общем был полностью погружён в последствия публикации. Неподалеку от нашего дома на поле были огромные антенны на мачтах (ну очень здоровые), частенько ходили туда с квадрокоптером. Я заинтересовался ими, стал гуглить «большие антенны, Троицк», наткнулся на сайт rk3b.ru c интригующим названием «Школьный Центр космической связи», позвонил туда и напросился в гости – сам радиолюбитель.Так я познакомился с Александром Николаевичем Зайцевым, заслуженнейшим товарищем, который этот Центр возглавлял. Оказалось, что он много лет занимался исследованиями магнитосферы Земли в ИЗМИРАН и заодно знал весь научный бомонд г. Троицка. Разговорились, я упомянул, в том числе, про свой интерес к георадарам. Александр Николаевич в свою очередь рассказал мне про антенны на поле. Они оказались чисто любительскими: известный радиолюбитель В. Н. Комаров, будучи при этом успешным предпринимателем, собрал команду энтузиастов КВ связи, на свои деньги создал суперцентр и такие антенны, что они стали самыми лучшими в эфире. Подтверждение тому – первые места в соревнованиях на первенство мира по КВ-связи. А через некоторое время А. Зайцев познакомил меня с людьми из ООО «Компания ВНИИСМИ», которые (сюрприз!:) и занимались георадарами «ЛОЗА». Я встретился с П. Морозовым и А. Беркутом, её возглавлявшими. Они с радостью меня приняли, и мы во многом сошлись. Представьте себе моё изумление, когда они рассказали, что их устройство, георадар ЛОЗА, продаваемый по цене 25 000$ в базовой комплектации, работает на компараторах. И они как раз очень давно мечтали сделать устройство на аналого-цифровом преобразователе (АЦП), который позволил бы прибору работать быстро. И что попытки разные были, но никак успехом не увенчались. В общем, высказали полнейшую свою заинтересованность в разработке.
Впоследствии я получил полную информацию о том, как работает георадар «ЛОЗА». Там и правда не было ничего кроме компараторов и нескольких микросхем, лучшая из которых, впрочем, была самой передовой в семействе FPGA лет 20 назад. Становилась понятна главная жалоба ВНИИСМИ на свой прибор: надоело пальцем жать на кнопку. Ведь что такое работа на компараторах: для одного измерения (измерения в одной точке) нужно последовательно послать в землю 128 импульсов, что занимает от секунд до 2 минут, в зависимости от передатчика. То есть прибор работает по принципу: нажал на кнопку, постоял-подождал, передвинул прибор дальше по рулетке на 10 см. (действительно расстилается по земле рулетка, чтобы двигаться с шагом в 10 см.) и так далее. Представляете себе скорость такой работы? Кстати, блок управления либо компьютер подключаются к Передатчику проводом, поэтому для съёмки необходимы минимум 2 человека: тот, кто перемещает георадар, и оператор, идущий за ним на проводе.
Также мне представилась возможность изучить несколько разных георадаров – серийных устройств и прототипов разных производителей и разработчиков. Например, вот эта большая тяжёлая коробка весит килограммов 5 или около того; внутри там стоит АЦП на 1800 Мегасемплов в секунду, каждая плата в отдельном корпусе и с отдельным экраном – в итоге много лишнего веса и большие габариты, что сделало прототип невозможным к использованию в принципе; он не работал.
Другой прототип был поудачнее, но проблема была в том, что его надо было очень долго настраивать; иногда он не включался, сбоил. Вообще, одна из проблем георадара — это необходимость работать в очень большом динамическом диапазоне. Импульс, который отправляется под землю, по мере прохождения сквозь неё очень быстро затухает. Чтобы увидеть и первый отклик этого импульса, и отклик, пришедший глубоко из-под земли, нужны усилители и АЦП, способные принимать и различать как очень сильные сигналы, так и очень-очень слабые. Вот эта амплитуда и называется динамическим диапазоном. В данном прототипе для этого использовался двухканальный усилитель — один канал усилителя работал с сильными сигналами, а другой со слабыми. То есть было 2 канала оцифровки, которые, к слову, никак не удавалось свести воедино. Регулируя усиление, прибор можно было настроить на какую-то глубину и в ней он что-то видел. Но не выше, не ниже заданного уровня он не видел, пока его не перенастроишь на иные параметры. Кроме того, у прототипа была очень большая чувствительность к помехам.
Итак, я начал проектировать собственное высокоскоростное, мощное устройство. Работа предстояла громадная, но были и хорошие новости: часть работы была уже проделана — за основу я взял ту электронику, которую (та-дам!..:) я разработал для ДНК-секвенатора.
Работа над георадаром и комплексом программного обеспечения заняла около года. Я добился не только полной автоматизации, высоких скоростей, возможности управлять георадаром с любого устройства, мне удалось создать, по сути, универсальное ядро под любой высокотехнологичный проект: система на модуле (Zturn) → система на кристале Zynq → связка работы FPGA+CPU+Linux+Django+WebSockets+Javascript… Впрочем, оставлю интригу. Чтобы не утомлять читателя, выношу техническую часть в отдельную статью.
Разработанный мною прибор представляет из себя 2 устройства – Передатчик и Приёмник, у каждого своя антенна. Сейчас размеры устройств 22,2 х 14,6 х 5,5 см., в следующей партии планируется ещё уменьшить габариты. Для исследований на небольшой глубине применяются стандартные метровые антенны. В зависимости от длины и мощности антенн глубина зондирования на благоприятных почвах может достигать нескольких сотен метров. Для перемещения георадара может быть использована ручная переноска, платформа на колёсиках, складные/гибкие антенны глубинного зондирования с посадочными местами под Приёмник и Передатчик; под спец. задачи могут быть созданы иные средства перемещения (например, надувные – для исследования подводных объектов). Платформа с георадаром может быть прикреплена к транспортному средству, георадар способен производить съёмку в автоматическом режиме на скорости до 40 км/ч (то, что мы протестировали, вероятно и больше). Регистрация перемещения прибора осуществляется при помощи датчика колеса и GPS. Все процессы автоматизированы, прибор лёгок в управлении, не требует дополнительного оператора, со съёмкой справится и один человек. Приоритеты: мощность, компактность, лёгкость, пассивная охлаждаемость, возможность комплектации с различными средствами перемещения и антеннами разной мощности. Эти две небольшие коробочки – могут стать сердцем георадарного комплекса любой мощности. Дальше скучное, спецификация:
• Частотный диапазон (МГц) 1-300
• Частота следования зондирующих импульсов до 1000 импульсов в секунду (при максимальной частоте импульсов при движении со скоростью 36 км/ч интервал измерений составит 1 мм)
• Тип импульса: широкополосный видеоимпульс, без несущей частоты
• Мощность в импульсе 5 МВт
• Длительность импульса 1 нсек
• Приёмник: частота дискретизации 1GSPS (1нсек)
• Режим регистрации АЦП 16 бит
• Усилитель логарифмический
• Динамический диапазон изменяемый до 120 Дб
• Временные развертки (количество отсчетов в одном сигнале зондирования) 16000
• Автоматическая синхронизация с передатчиком
• Встроенная память 64 Гбайт
• Дополнительные датчики: барометр, акселерометр (измерение угла наклона прибора), GPS, энкодер колеса
• Управление кнопками на приборе или через wifi с любого устройства. Есть web интерфейс, программа для PC
• Время работы от встроенной батареи 4 часа, возможно присоединение внешнего аккумуляторного блока (+12 часов)
• Встроенный генератор тестового сигнала
• Габаритные размеры 222 х 146 х 55 mm (х 2)
Стандартные антенны имеют центральную частоту 100Mhz (1,5м), 200MHz (1м). Существуют также низкочастотные антенны для глубокого зондирования 10MHz (10м), 25Mhz (6м), 50Mhz (3м) (в скобках размер антенн, а не глубина зондирования). Увеличивая длину антенн – увеличиваем глубину зондирования. Важно отметить, что глубина зондирования зависит также от мощности передатчика и от плотности/свойств грунтов. Таким образом, всегда можно увеличить антенны, поэтому глубина зондирования может достигать 500 м.
Георадар готов к работе сразу — после нажатия кнопки «ON» георадар начнёт вести съёмку и записывать всё во внутреннюю память. Он может работать абсолютно автономно, без подключения к нему оператора.
Устройство раздаёт wi-fi, подключиться к нему можно с любого компьютера, планшета, телефона через web браузер. Вы попадаете в программу, позволяющую управлять устройством, менять настройки, видеть текущий трек. В верхней строке интерфейса различные статусы, позволяющие понять, что происходит в данный момент: напряжение аккумулятора, температура на процессоре, время, время работы, GPS данные. Ниже вкладки и кнопки настройки триггеров, offsetов, логарифмической шкалы, зума, режимы работы.
Прибор может производить одно измерение по нажатии кнопки, либо по времени, например, каждые 0,3 секунды, либо измерения могут быть синхронизированы с работой колеса, например на каждую четверть оборота колеса происходит срабатывание, то есть Передатчик посылает импульс, а Приёмник его принимает и записывает. Последний режим очень удобен, так как позволяет привязать платформу с георадаром к машине, например, и производить равномерные измерения независимо от скорости движения.
Первый запуск был произведён совместно с представителями ВНИИСМИ на строящейся асфальтной дороге на юго-западе Москвы. Вот так выглядела инсталляция моего прибора: 2 антенны на платформе максимально близко к земле, белая коробочка — это Передатчик, чёрная — Приёмник.Заранее было выбрано место, где в разных точках под землей лежали коммуникации. По плану было определить такие точки сначала прибором Лоза, а затем тоже самое место посмотреть моим прибором. Пока ВНИИСМИ свой прибор настраивали, я с пол оборота завёлся и проехался, и всё увиделось. Вот первая картинка, полученная с моего прибора. Мы подошли к рабочим, которые в это время занимались там строительством дороги и сверили результаты наших съёмок с картами коммуникаций, которые были у них – всё совпало, там действительно были пластиковые трубы 200-го диаметра на глубине 2 м. Это был успех.На картинке ниже кусок той же съёмки строящейся дороги. Справа вы видите извивающийся столбик — это осциллограмма импульса. Маленькая пика вверху — это тот импульс, который сгенерировал Передатчик, а всё что ниже, это то, что приходит на Приёмник со всех сторон, но в основном из под земли. Большая цветная картина рядом с осциллограммой импульса — это набор таких столбцов, то есть каждый пиксельный столб это 1 импульс, только здесь амплитуда переведена в цвет. Красная полоса в верхней части цветной картинки — это уровень земли. Дальше импульс уходит в землю, и ниже мы видим всё, что отразившись прилетело на Приёмник. Небольшие сине-красные бугорки чуть ниже второй красной полосы и есть пересечение диаграмм направленности антенн с точечными объектами в виде труб. То есть, в тех местах, где по ходу движения прибора мы пересекаем трубы, трубы дают вот такой вот радио-образ, причём в некоторых местах видно две трубы, если увеличить.
Также здесь видны большие размытые параболы, которые идут до конца картинки вниз — это отражение по воздушному каналу от различных объектов, в данном случае линий электропередачи, которые стояли рядом. На мой взгляд, это большая проблема, которая не нашла пока решения в известных мне разработках. Информация об отражениях вне исследуемой среды явно лишняя, она отвлекает внимание и мешает интерпретации полезного сигнала, поскольку постоянно надо анализировать окружение и решать из-под земли пришло это отражение или по воздуху. Поэтому в планах программно-аппаратными средствами минимизировать отражения по воздуху.Вот на этой картинке — ручей, закопанный при строительстве дороги; видно русло на глубине порядка 2 метров. Ниже на этом участке тоже были большие параболы — отражение от столбов освещения, вдоль дороги.У меня рядом с домом есть река Незнайка с очень интересной геологией, где всё как в учебнике: есть старое русло, четвертичные отложения, аллювий, речные террасы. Там тоже мы ходили с ребятами из ВНИИСМИ испытывали, сравнивали работу разных георадаров. Здесь в конце видно старое русло реки, а большие зелёные параболы — это отражение забора соседнего посёлка на металлических столбах.
Как видите, только человек уже знакомый с принципами интерпретации таких картинок, сходу определит, что это русло реки, а это отражение от забора. Таким образом, сама форма вывода данных существенно ограничивает круг людей, способных легко начать работать с георадарами. И здесь, по-моему, очень интересная задача стоит — перевода этих данных в понимаемую любым пользователем картинку. Выполнена эта задача может быть с применением искусственного интеллекта (нейросети), который можно обучить маркировать, обозначать реальные контуры объектов и предполагать их назначение и свойства. Также решить проблему нечитабельности данных помогут объёмные построения, но об этом дальше.На картинке ниже очень интересный рельеф (съёмка произведена 22.07.2020 в Ивановской области, д. Калинкино): видна какая-то продолговатая структура — скорее всего это слой песка либо ещё какого-то менее плотного, чем превалирующие в наших краях суглинки, грунта. У меня есть мысль полностью автоматизировать идентификацию слоёв. Как мы определили выше, волна отражается от тех мест, где происходит изменение диэлектрической проницаемости среды. Мы можем померять скорость прохождения импульса на том или ином ярусе этой картинки и предположить состав среды и/или степень её влажности.
В конце лета мне удалось съездить в археологическую экспедицию под Рязанью близ села Терехово Шиловского района на место стоянки/поселения пятого века. Там на схождении двух рек есть холм, поросший деревьями – остались многочисленные свидетельства, что в пятом веке там было Городище. Стали ходить там с георадаром — на первом рисунке наш трек по GPS. В центре очень густо росли деревья, мы смогли пройти по периметру, дальше деревьев было меньше и мы всё довольно плотно исходили. У меня была возможность воспользоваться программой, которая анонсировалась, как программа позволяющая строить 3D модель из линейных проходок. Такого результата ждали от меня археологи — «построим и увидим наглядно что где зарыто». Лучше всего подобные построения делать из хорошо (плотно) исхоженных участков. Я загрузил в программу область с самыми плотными проходами и вошёл в режим 3D – программа выстроила поле из цветовых столбиков, которые можно было «вытягивать» вниз и вверх, меняя настройки, больше никаких возможностей я не увидел – проконсультировавшись выяснил, что программа строит лишь псевдо 3D.
Представим, что у нас есть некие столбцы, которые нам известны, где георадар сверху проехал, и мы знаем, что вертикально вниз в этой точке находится. Следующая задача, это достроить недостающие столбцы аппроксимацией, что и сделала программа. Но сделала она это банально решёткой по 2 осям. В результате такого построения возникают различные артефакты – крестообразные, из горизонтальных и вертикальных линий. Если мы берём какой-то срез 3D плоскости, мы имеем цветную картинку из среза столбиков, которые программа просто вверх либо вниз вытягивает в зависимости от амплитуды сигнала.
Настоящее 3D построение несколько сложнее — из физически отснятых на разной глубине точек нам надо выявить некие плоскости, переходные плоскости из одного в другое и дальше с помощью пользовательского интерфейса иметь возможность выбирать отдельные плоскости, которые нам необходимо отобразить.
Построение объёмной модели — это вообще отдельная очень интересная задача. Сейчас обдумываю идею использовать одну антенну с Передатчиком и 2 разнесённые друг от друга антенны с Приёмниками, то есть 2 Приёмника. Получается своего рода фазированная антенная решетка. По времени прохождения сигнала, точнее по разнице во времени приёма его первым и вторым Приемником, можно определить точное место, где этот сигнал отразился. Таким образом мы можем за одно измерение, измерение одиночного импульса, сразу выстраивать картинку в 2D плоскости. В обычной радиолокации используются несущие частоты, преобразования Фурье, построения по синусам и косинусам. В данном же случае используется несколько отличная математика: на основании данных об отражении одиночного наносекундного импульса мы делаем свертку и дальше высчитываем откуда этот импульс пришёл с какой вероятностью. Эта идея сейчас в стадии написания софта, который позволит сразу в процессе прохода моделировать 3D картинку, а также измерять скорость прохождения импульса в слоях, что позволит сразу предполагать состав и качество сред.
Где может быть использован георадар?
Самые верхние под поверхностью земли слои называют «культурным слоем» — это археология, прекрасно видны отдельные объекты, фундаменты строений, видны даже копаные и засыпанные когда-то ямы. Так, есть очень интересная задача связанная, например, с пустыней Сахара. Сахара расширяется, и многие археологи сходятся во мнении, что под её песками погребены города и строения. Во времена Египта там была саванна, текли реки, жили животные. Георадар может просканировать всё до грунта, и найти там строения и поселения. Это собственно единственный прибор, который способен это сделать.
Кстати, глубина сканирования зависит от плотности и типа грунта, его минерализации, влажности. Песок — это тот грунт, в котором георадар видит наиболее глубоко. Вторая такая очень проницаемая для георадара среда — это лёд. Так, георадар может быть применён и для подповерхностного зондирования водных объектов. В солёной воде глубина зондирования будет меньше, в пресной воде больше, и самое глубокое зондирование может быть произведено во льдах.
Еще одно применение георадара — это поиск подземных коммуникаций, труб, ходов, тоннелей. Можно очень эффективно контролировать качество дорожного строительства — какой толщины песчаную подложку положили, равномерно ли уложен асфальт. Так же можно проверять состояние фундаментов и стен строений. Можно мониторить состояние дорожного полотна во время эксплуатации, чтобы вовремя предпринять меры в случае подмыва дороги, образования карстовых полостей, пока это еще не привело к провалу. Подмывы случаются и под фундаментами зданий, сооружений. Так, причиной разлива нефти в Норильске было то, что был подмыт фундамент нефтехранилища. Регулярные проверки подобных объектов, помогли бы успешно подобные катастрофы предотвращать.
Геология. При георадарной съёмке прекрасно видно границы рек, выходы известняков, где какие слои пород находятся, видны кимберлитовые трубки, морены. По косвенным признакам можно определять подземные воды. Так, вода просачивается вниз пока не встретится какой-то слой, через который она просочиться не может, и скапливается на границе слоёв в низине. Также можно прогнозировать и предотвращать сходы селей, оползни. Георадар может быть полезен в разведке полезных ископаемых, в том числе может использоваться при бурении.
В декабре 2020 года базовая версия прибора успешно прошла испытания и была сертифицирована. Георадар получил Название GEORA.
Готовится к выпуску первая небольшая партия. Цель — начать получать более широкий опыт практического использования и на основании этого опыта выявить возможности по улучшению удобства пользования, функциональности. Вторая задача — создание программного обеспечения следующего поколения, которое сделает наглядным и удобным анализ данных даже для неподготовленного пользователя.
К широкому выпуску планируются 2 версии: для частного использования и для коммерческого. Есть возможность кастомизировать оборудование и софт под любые задачи.
Глобальная цель — сделать георадар вещью более массовой, доступной по цене человеку, интересующемуся историей, археологией. Доступной индивидуальным предпринимателям, которые работают в сфере проектирования, строительства, экспертизы, исследования недр. Широкое распространение прибора сформирует сообщество пользователей. В планах — создание централизованной базы данных измерений. Чтобы любой, при желании, мог отправлять данные сканирования на сервер, делиться ими на возмездной или безвозмездной основе. Кроме того, больший массив данных позволит эффективнее обучить нейросеть интерпретации, визуализации результатов сканирования.
Сейчас готовится к публикации вторая часть статьи с подробным описанием технической части. На сегодня всё, если интересно — пишите, почта sokolov.labs@gmail.com. Всем пока, спасибо за внимание!




