
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!
У нас было десять разбитых дронов за год, тестовые полеты два раза в день, три кандидата технических наук в команде, прототип из палочек для суши и желание найти способ больше не бить дроны.
Очень спорно, очень необычно, очень странно, но работает! На стыке архитектуры, коллаборативной робототехники и беспилотных летательных аппаратов. Представляем: Tensodrone™.

Tensodrone (Тенсодрон) — беспилотный летательный аппарат (БПЛА) мультироторного типа новой конструкции с защитой от столкновений, сделанный по принципу тенсегрити. Такой подход позволяет повысить устойчивость к ударам при меньшей массе, совместив защитную клетку и конструкцию несущей рамы.
Проект является ярким примером взаимодействия различных команд Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис.

Источник
Просто потому что летают. Системы управления, моторы, датчики, автопилоты, бортовые компьютеры и софт — все это разработчики стараются делать как можно надежнее, но риск разбить коптер остается. А если это опытный образец, то сразу нужно изготавливать несколько (штук или десятков?) для отладки. Кроме внутренних факторов, очевидно, остаются и внешние: ветер, пассивные препятствия, активное воздействие.
Вряд ли кто-то будет спорить, дроны падают, сталкиваются, переворачиваются.
Можно стараться этого избегать, можно к этому подготовиться. Что лучше? Решать разработчику, пользователю и законодателю.
Я за совместное применение обоих подходов. Но в этой статье сконцентрируемся на том, как избежать последствий падения или столкновения БПЛА.
Наиболее прямолинейный подход избежать последствий падения или столкновения БПЛА — защитная клетка и прочие защитные конструкции. Здесь две задачи — защищать дрон от повреждений и защищать среду, где работает дрон, и людей в ней от дрона.
Базовый вариант конструкции, относящейся скорее к защите людей от дрона, — защита пропеллера.

Дрон AR.Drone 2.0 с защитой пропеллеров. Источник
Есть еще забавные решения, вдохновленные оригами, со складными гибкими конструкциями защиты пропеллеров (и даже конструкции рамы), развитие которым дала группа профессора Дарио Флореано в EPFL.
Превалирующей конструкцией защиты самого дрона (а вместе с тем и людей от него) является защитная клетка. Сам квадрокоптер находится внутри клетки.
Дрон Clover от российской COEX
Российская компания COEX делает дроны для учебных целей, которые по умолчанию имеют защиту пропеллеров, а опционально — защитную клетку.
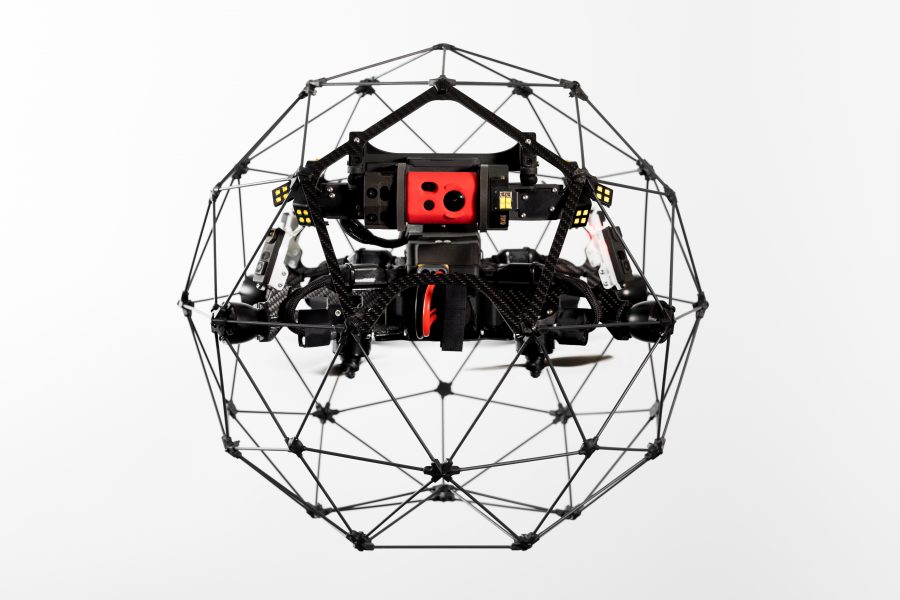
Дрон Flyability ELIOS
Швейцарская (Швейцария — столица дроностроения?) компания Flyability — выпускает, пожалуй, самый коммерчески успешный коптер ELIOS с защитной клеткой для выполнения инспекций внутри помещений. Оригинальность конструкции состоит в креплении защитной клетки к раме коптера на подвижном подвесе с возможностью стабилизации.

Дрон Dronistics
Стартап Dronistics из EPFL (опять Швейцария, это выходцы из группы Dario Floreano) предлагает дрон со складной клеткой для безопасной доставки грузов.
Недостатком таких дронов является увеличение массы конструкции — нужно носить с собой защитную клетку и элементы крепления к БПЛА. Стремление снизить массу защитной конструкции приводит к снижению ее прочности.
Другое направление, связанное с идеей защищенного дрона (и не только), — складные дроны и дроны с изменяемой геометрией (foldable и morphing). Имеется ввиду способность дрона изменять свою геометрию в полете. Складные конструкции делают для того, чтобы избежать повреждений дрона (например, дрон может «съежиться» перед ударом), а также дрон может, например, сложиться до компактного размера для пролета в узкие окна.
Возможно, вы видели крутой ролик с дроном с изменяемой геометрией из Швейцарии (да-да, снова ETH + EPFL + UZH). Нам эта идея тоже интересна и близка, дальше расскажу почему.
Дрон с изменяемой геометрией
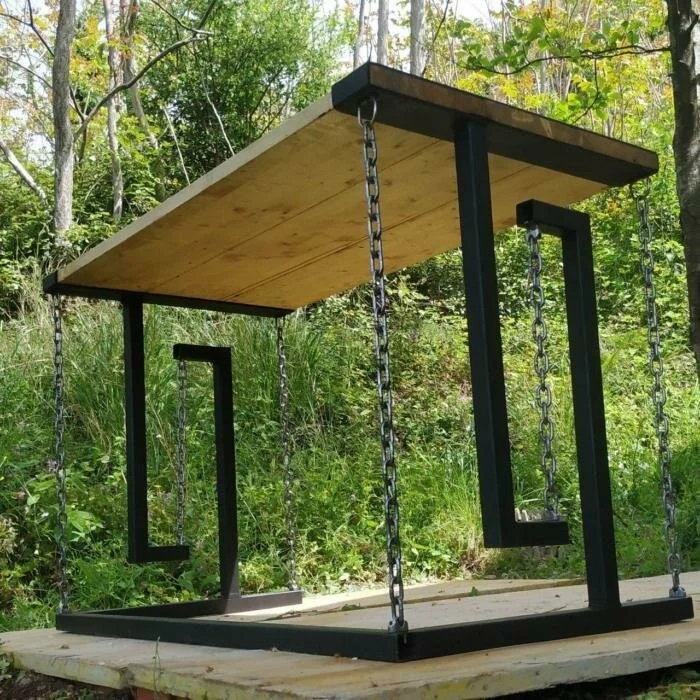
Тенсегрити-стол. Источник
Тенсегрити — способность каркасных конструкций использовать взаимодействия работающих на сжатие цельных элементов с работающими на растяжение составными элементами для того, чтобы каждый элемент действовал с максимальной эффективностью и экономичностью (Вики). Термин относительно новый, появился в 1960-х годах. Стол на картинке выше стоит (или висит) не имея ножек как раз за счет принципа тенсегрити.
Известно множество современных применений такого подхода в архитектуре, откуда он и появился, прежде всего при проектировании мостов.

Самый большой в мире мост, выполненный в стиле тенсегрити, Австралия. Источник
Одно из старейших направлений робототехники — промышленные манипуляторы — сейчас переживает новую стадию своего развития, связанную с т.н. коллаборативной робототехникой. В речи специалистов в этой области можно с большой частотой услышать два термина — stiffness и compliance.
В промышленной робототехнике термин compliance относится к гибкости и податливости. Неподатливый (non-compliant), жесткий (stiff) робот — это устройство, которое работает независимо от того, какие внешние силы на него воздействуют. Энд-эффектор робота будет каждый раз следовать точно по одной и той же траектории. С другой стороны, энд-эффектор податливого робота может двигаться по различным траекториям для выполнения задачи и прилагать различные усилия к объекту. Например, робот может схватить яйцо, не раздавив его. Управляемая жесткость лежит в основе коллаборативной робототехники.
Идеи применения тенсегрити в робототехнике идут как раз из коллаборативной и «мягкой» (“soft”) робототехники. Тенсегрити структуры — легкие, ударопрочные и дают возможность контролировать их жесткость (податливость) и конфигурацию (форму).
Наиболее известным примером применения тенсегрити в робототехнике является складной наземный робот NASA Super Ball Bot, который планировали использовать для исследования поверхностей планет. Благодаря сфероподобной структуре из кабелей и тросов робот может выдержать падение с большой высоты, когда его сбрасывают на планету с космического корабля. Оказавшись на поверхности, робот может перекатываться в любом направлении за счет управления длинами стержней.
Видео IEEE Spectrum о NASA SUPERball v2
В УИ мы разрабатываем математический аппарат для моделирования, проектирования и управления робототехническими системами с напряженно-связанными структурами с переменной жесткостью (это и есть тенсегрити). Это фундаментальная работа, применение которой можно найти в самых разных роботах, например, тенсегрити-манипуляторах или шагающих роботах.
Тенсегрити-манипулятор и научный сотрудник и аспирант УИ Олег Балахнов
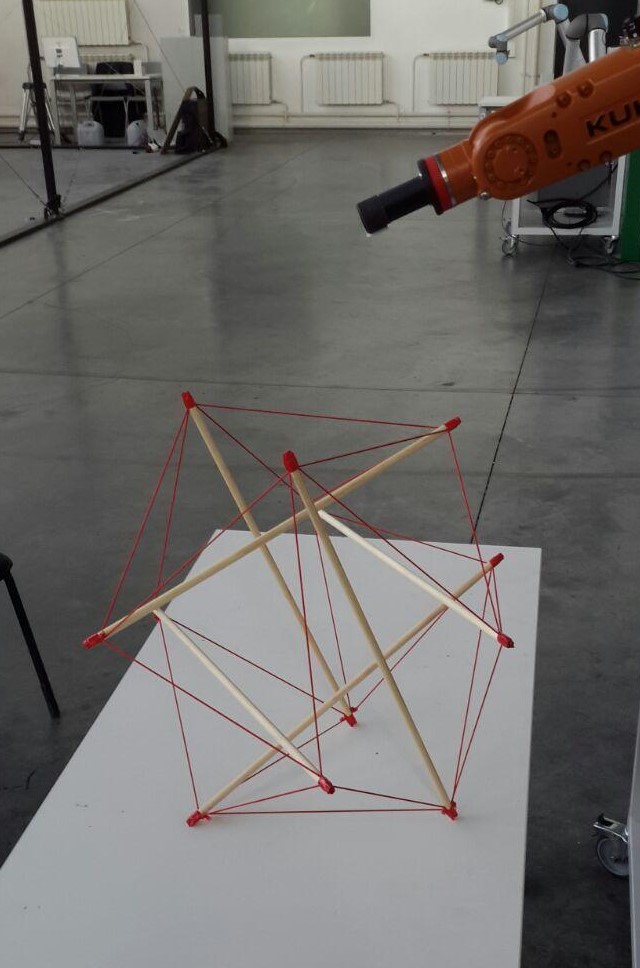
Олег первым у нас начал прототипировать тенсегрити-роботов — сначала из деревянных палочек и резинок. Фото конструкции из палочек для суши, пожалуй, тоже еще хранит история чатов.

Вы, наверное, уже поняли
Проходил я как-то в нашем гараже мимо привлекающей глаз странной конструкции:
Спросил: «Что это такое?» Мне сказали: «неубиваемая конструкция — роняй, а она не ломается».
Я сломал (на самом деле просто скукожил — изменил форму, потому что резинки были плохо закреплены и сместились). Но такая конструкция нам для дронов нужна! И мы начали авантюрный эксперимент.
Видео с тестом тенсегрити на выживаемость

Сергей одобряет авантюрный эксперимент. Джефф Безос тоже
Сергей Савин — старший научный сотрудник, доцент, серьезный ученый с кандидатской в 25 лет и множеством рейтинговых публикаций. Он один из отцов-основателей тенсегрити-робототехники в УИ, получил несколько грантов на развитие тенсегрити в робототехнике.
Дмитрий, Олег и Хэни собирают первого тенcодрона (что-то напоминает). Дмитрий Девитт GigaFlopsis — научный сотрудник и аспирант Университета и тот, кто применил самые современные технологии — карбоновые трубки и кевларовые нити, 3D-печать карбоном и мягким пластиком, все реализовал и заставил летать.

Процесс работы по сборке тенсодрона

Ура. получилось!
Еще Дмитрий — первый актер после тенсодрона в эпичных роликах его полетов. Оцените:
Игра двух актеров в ролях самих себя. Video by DeluuusiOn
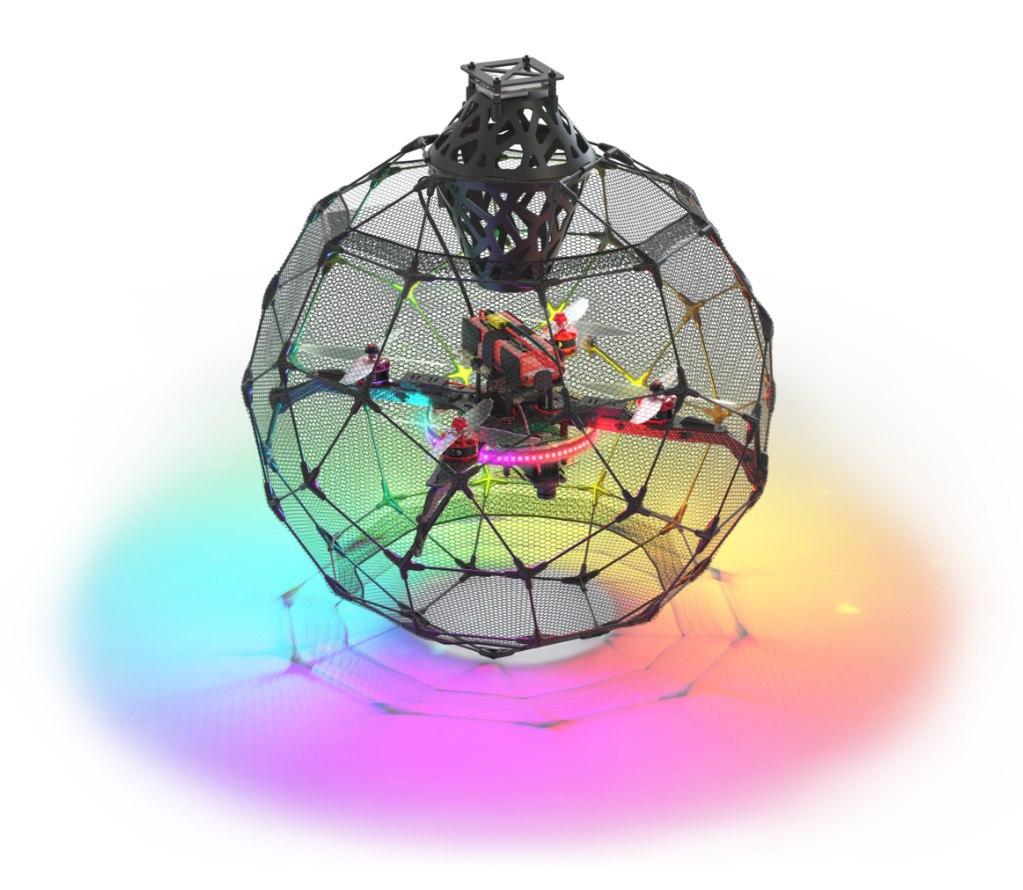
Конструкция первого прототипа дрона получилась такая:
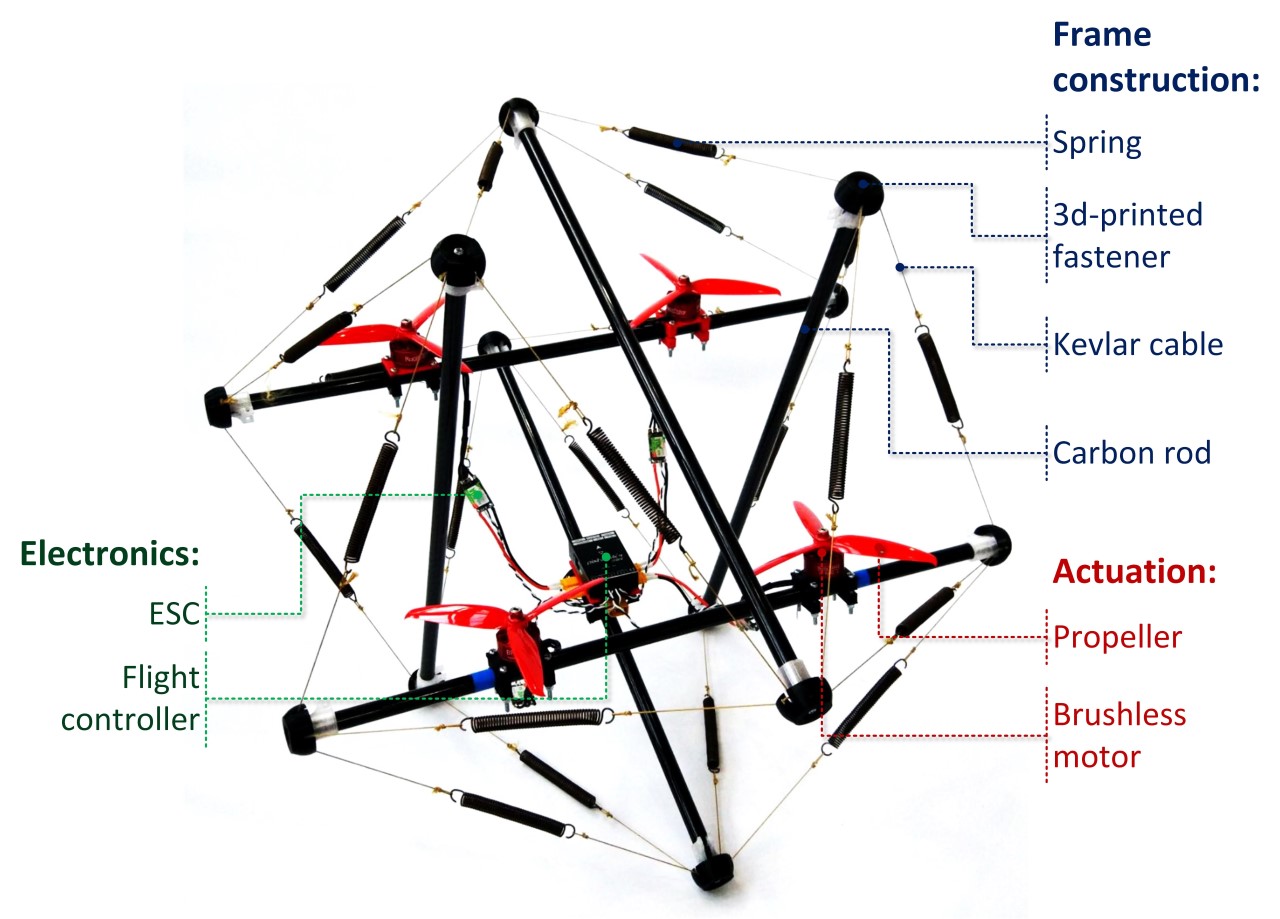
Конструкция прототипа тенсодрона Университета Иннополис
Использована базовая шестистержневая конструкция тенсегрити. В отличие от квадрокоптеров с жесткой рамой у нас две пары двигателей с винтами установлены на различных балках. Также ни один из них не соединен жестко с автопилотом, который расположен на нижней балке.
Бортовая электроника и электромеханические компоненты прототипа дрона включают в себя:
Тросы сделаны из кевларового волокна с изготовленными на заказ пружинами. Стержни изготовлены из карбоновых трубок. Торцевые колпачки и другие мелкие детали напечатаны на 3D-принтере.
Основная проблема управления по сравнению с обычным жестким дроном — вибрации, которые, во-первых, больше по амплитуде, во-вторых, разные для контроллера и различных двигателей, т.к. они установлены на различных балках (хотя это же может быть и плюсом — виброразвязка).
Ранние тесты тенсодрона на подвесе: вибрации (извините за вертикальное видео)
Ранние тесты тенсодрона в полете: вибрации
Данные проблемы мы решаем с двух сторон — улучшением конструкции для уменьшения вибраций при полете и разработкой алгоритмов управления и оценивания состояния с целью подавления вибраций и более качественного управления, в том числе с учетом дополнительных данных от IMU датчиков на балках и динамической модели тенсегрити-структуры.
Падение на пол с последующим взлетом, в помещении (без монтажа)
Впереди еще много интересного:подача заявки на патент, написание научной статьи с подробными исследованиями, апробирование новых вариантов конструкции (ох, их у нас придумано много).
Сейчас эта штука летает сама по заданной миссии (в том числе по GPS на улице, а в помещении — будем использовать визуальную одометрию). Для нас очевидно дальнейшее применение для инспекции помещений.
За исключением управления низкого уровня и формы, тенсодрон — это обычный дрон, мы интегрируем в него наши алгоритмы планирования движения для автономного обследования и картографирования помещений (exploration) с обходом препятствий.
Пример выполнения автоматической инспекции. Магистерский проект Виктора (Victor Massague), нашего выпускника и в ближайшем будущем, надеюсь, сотрудника из Барселоны
Потенциал конструкции тенсегрити-дрона гораздо больше простого дрона.
Помните Foldable Drone из видео выше? А SUPERball?
Так вот, если активно изменять длины стержней или натяжения тросов тенсегрити-дрона, можно управлять его конфигурацией (или, проще говоря, формой)!
Получается Foldable Morphing Tensodrone. Активно ведем исследования в этой области.
Тенсодрон с изменяемой в полете геометрией Университета Иннополис (концепт)

Применение тенсегрити для летательного аппарата открывает новые исследовательские задачи. Прототип конструкции уже сейчас показывает, что идея работает и её можно применять для защиты БПЛА.
Очень спорно, очень необычно, очень странно, но работает! На стыке архитектуры, коллаборативной робототехники и беспилотных летательных аппаратов. Представляем: Tensodrone™.
Tensodrone (Тенсодрон) — беспилотный летательный аппарат (БПЛА) мультироторного типа новой конструкции с защитой от столкновений, сделанный по принципу тенсегрити. Такой подход позволяет повысить устойчивость к ударам при меньшей массе, совместив защитную клетку и конструкцию несущей рамы.
Проект является ярким примером взаимодействия различных команд Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис.
Дроны падают
Источник
Просто потому что летают. Системы управления, моторы, датчики, автопилоты, бортовые компьютеры и софт — все это разработчики стараются делать как можно надежнее, но риск разбить коптер остается. А если это опытный образец, то сразу нужно изготавливать несколько (штук или десятков?) для отладки. Кроме внутренних факторов, очевидно, остаются и внешние: ветер, пассивные препятствия, активное воздействие.
Вряд ли кто-то будет спорить, дроны падают, сталкиваются, переворачиваются.
Можно стараться этого избегать, можно к этому подготовиться. Что лучше? Решать разработчику, пользователю и законодателю.
Я за совместное применение обоих подходов. Но в этой статье сконцентрируемся на том, как избежать последствий падения или столкновения БПЛА.
Защитные конструкции
Наиболее прямолинейный подход избежать последствий падения или столкновения БПЛА — защитная клетка и прочие защитные конструкции. Здесь две задачи — защищать дрон от повреждений и защищать среду, где работает дрон, и людей в ней от дрона.
Базовый вариант конструкции, относящейся скорее к защите людей от дрона, — защита пропеллера.
Дрон AR.Drone 2.0 с защитой пропеллеров. Источник
Есть еще забавные решения, вдохновленные оригами, со складными гибкими конструкциями защиты пропеллеров (и даже конструкции рамы), развитие которым дала группа профессора Дарио Флореано в EPFL.
Превалирующей конструкцией защиты самого дрона (а вместе с тем и людей от него) является защитная клетка. Сам квадрокоптер находится внутри клетки.
Дрон Clover от российской COEX
Российская компания COEX делает дроны для учебных целей, которые по умолчанию имеют защиту пропеллеров, а опционально — защитную клетку.
Дрон Flyability ELIOS
Швейцарская (Швейцария — столица дроностроения?) компания Flyability — выпускает, пожалуй, самый коммерчески успешный коптер ELIOS с защитной клеткой для выполнения инспекций внутри помещений. Оригинальность конструкции состоит в креплении защитной клетки к раме коптера на подвижном подвесе с возможностью стабилизации.
Дрон Dronistics
Стартап Dronistics из EPFL (опять Швейцария, это выходцы из группы Dario Floreano) предлагает дрон со складной клеткой для безопасной доставки грузов.
Все-таки разбиваются

Недостатком таких дронов является увеличение массы конструкции — нужно носить с собой защитную клетку и элементы крепления к БПЛА. Стремление снизить массу защитной конструкции приводит к снижению ее прочности.
Дроны с изменяемой геометрией
Другое направление, связанное с идеей защищенного дрона (и не только), — складные дроны и дроны с изменяемой геометрией (foldable и morphing). Имеется ввиду способность дрона изменять свою геометрию в полете. Складные конструкции делают для того, чтобы избежать повреждений дрона (например, дрон может «съежиться» перед ударом), а также дрон может, например, сложиться до компактного размера для пролета в узкие окна.
Возможно, вы видели крутой ролик с дроном с изменяемой геометрией из Швейцарии (да-да, снова ETH + EPFL + UZH). Нам эта идея тоже интересна и близка, дальше расскажу почему.
Дрон с изменяемой геометрией
Тенсегрити
Тенсегрити-стол. Источник
Тенсегрити — способность каркасных конструкций использовать взаимодействия работающих на сжатие цельных элементов с работающими на растяжение составными элементами для того, чтобы каждый элемент действовал с максимальной эффективностью и экономичностью (Вики). Термин относительно новый, появился в 1960-х годах. Стол на картинке выше стоит (или висит) не имея ножек как раз за счет принципа тенсегрити.
Известно множество современных применений такого подхода в архитектуре, откуда он и появился, прежде всего при проектировании мостов.
Самый большой в мире мост, выполненный в стиле тенсегрити, Австралия. Источник
Альтернативные применения :)
Тенсегрити в робототехнике
Одно из старейших направлений робототехники — промышленные манипуляторы — сейчас переживает новую стадию своего развития, связанную с т.н. коллаборативной робототехникой. В речи специалистов в этой области можно с большой частотой услышать два термина — stiffness и compliance.
В промышленной робототехнике термин compliance относится к гибкости и податливости. Неподатливый (non-compliant), жесткий (stiff) робот — это устройство, которое работает независимо от того, какие внешние силы на него воздействуют. Энд-эффектор робота будет каждый раз следовать точно по одной и той же траектории. С другой стороны, энд-эффектор податливого робота может двигаться по различным траекториям для выполнения задачи и прилагать различные усилия к объекту. Например, робот может схватить яйцо, не раздавив его. Управляемая жесткость лежит в основе коллаборативной робототехники.
Идеи применения тенсегрити в робототехнике идут как раз из коллаборативной и «мягкой» (“soft”) робототехники. Тенсегрити структуры — легкие, ударопрочные и дают возможность контролировать их жесткость (податливость) и конфигурацию (форму).
Наиболее известным примером применения тенсегрити в робототехнике является складной наземный робот NASA Super Ball Bot, который планировали использовать для исследования поверхностей планет. Благодаря сфероподобной структуре из кабелей и тросов робот может выдержать падение с большой высоты, когда его сбрасывают на планету с космического корабля. Оказавшись на поверхности, робот может перекатываться в любом направлении за счет управления длинами стержней.
Видео IEEE Spectrum о NASA SUPERball v2
Тенсегрити-роботы в Университете Иннополис
В УИ мы разрабатываем математический аппарат для моделирования, проектирования и управления робототехническими системами с напряженно-связанными структурами с переменной жесткостью (это и есть тенсегрити). Это фундаментальная работа, применение которой можно найти в самых разных роботах, например, тенсегрити-манипуляторах или шагающих роботах.
Тенсегрити-манипулятор и научный сотрудник и аспирант УИ Олег Балахнов
Олег первым у нас начал прототипировать тенсегрити-роботов — сначала из деревянных палочек и резинок. Фото конструкции из палочек для суши, пожалуй, тоже еще хранит история чатов.
Тенсегрити-виброробот
Тенсегрити-виброробот
Тенсегрити-виброробот
Синергетический эффект
Вы, наверное, уже поняли
I have a drone, I have tensegrity. Ugh! (Tensodrone)
Проходил я как-то в нашем гараже мимо привлекающей глаз странной конструкции:
Спросил: «Что это такое?» Мне сказали: «неубиваемая конструкция — роняй, а она не ломается».
Я сломал (на самом деле просто скукожил — изменил форму, потому что резинки были плохо закреплены и сместились). Но такая конструкция нам для дронов нужна! И мы начали авантюрный эксперимент.
Видео с тестом тенсегрити на выживаемость
Более жесткий тест
Squishy robotics — стартап, который делает тенсегрити-роботов для спасательных операций в случае стихийных бедствий, дистанционного мониторинга и космических исследований, и сбрасывает их с коптера
Squishy robotics — стартап, который делает тенсегрити-роботов для спасательных операций в случае стихийных бедствий, дистанционного мониторинга и космических исследований, и сбрасывает их с коптера
Авантюра
Сергей одобряет авантюрный эксперимент. Джефф Безос тоже
Сергей Савин — старший научный сотрудник, доцент, серьезный ученый с кандидатской в 25 лет и множеством рейтинговых публикаций. Он один из отцов-основателей тенсегрити-робототехники в УИ, получил несколько грантов на развитие тенсегрити в робототехнике.
Игорь обдумывает идею
Дмитрий, Олег и Хэни собирают первого тенcодрона (что-то напоминает). Дмитрий Девитт GigaFlopsis — научный сотрудник и аспирант Университета и тот, кто применил самые современные технологии — карбоновые трубки и кевларовые нити, 3D-печать карбоном и мягким пластиком, все реализовал и заставил летать.
Процесс работы по сборке тенсодрона
Ура. получилось!
Летает!
Еще Дмитрий — первый актер после тенсодрона в эпичных роликах его полетов. Оцените:
Игра двух актеров в ролях самих себя. Video by DeluuusiOn
Подробнее про конструкцию прототипа
Конструкция первого прототипа дрона получилась такая:
Конструкция прототипа тенсодрона Университета Иннополис
Использована базовая шестистержневая конструкция тенсегрити. В отличие от квадрокоптеров с жесткой рамой у нас две пары двигателей с винтами установлены на различных балках. Также ни один из них не соединен жестко с автопилотом, который расположен на нижней балке.
Бортовая электроника и электромеханические компоненты прототипа дрона включают в себя:
- Автопилот CUAV Pixhawk v5 mini;
- Аккумулятор 3s 1400 мАч;
- Регулятор Racerstar REV35 35A BLheliS 3-6S ESC;
- Моторы Racerstar Racing Edition BR2205 2300KV;
- IMU сенсоры MPU9250.
Тросы сделаны из кевларового волокна с изготовленными на заказ пружинами. Стержни изготовлены из карбоновых трубок. Торцевые колпачки и другие мелкие детали напечатаны на 3D-принтере.
Проблемы управления
Основная проблема управления по сравнению с обычным жестким дроном — вибрации, которые, во-первых, больше по амплитуде, во-вторых, разные для контроллера и различных двигателей, т.к. они установлены на различных балках (хотя это же может быть и плюсом — виброразвязка).
Ранние тесты тенсодрона на подвесе: вибрации (извините за вертикальное видео)
Ранние тесты тенсодрона в полете: вибрации
Мы не одиноки
Оказывается, у нас был конкурент.
Еще в начале (почти год назад), когда мы делали прототип, мы нашли это видео от ребят из Imperial College London:
Авторы пришли к той же идее, что и мы: применение тенсегрити для дронов — это интересно.
Т.к. никаких подробностей по конструкции и, тем более, прототипа представлено не было, свои работы мы продолжили.
Уже потом, когда у нас был летающий образец, мы получили отчет той же группы:
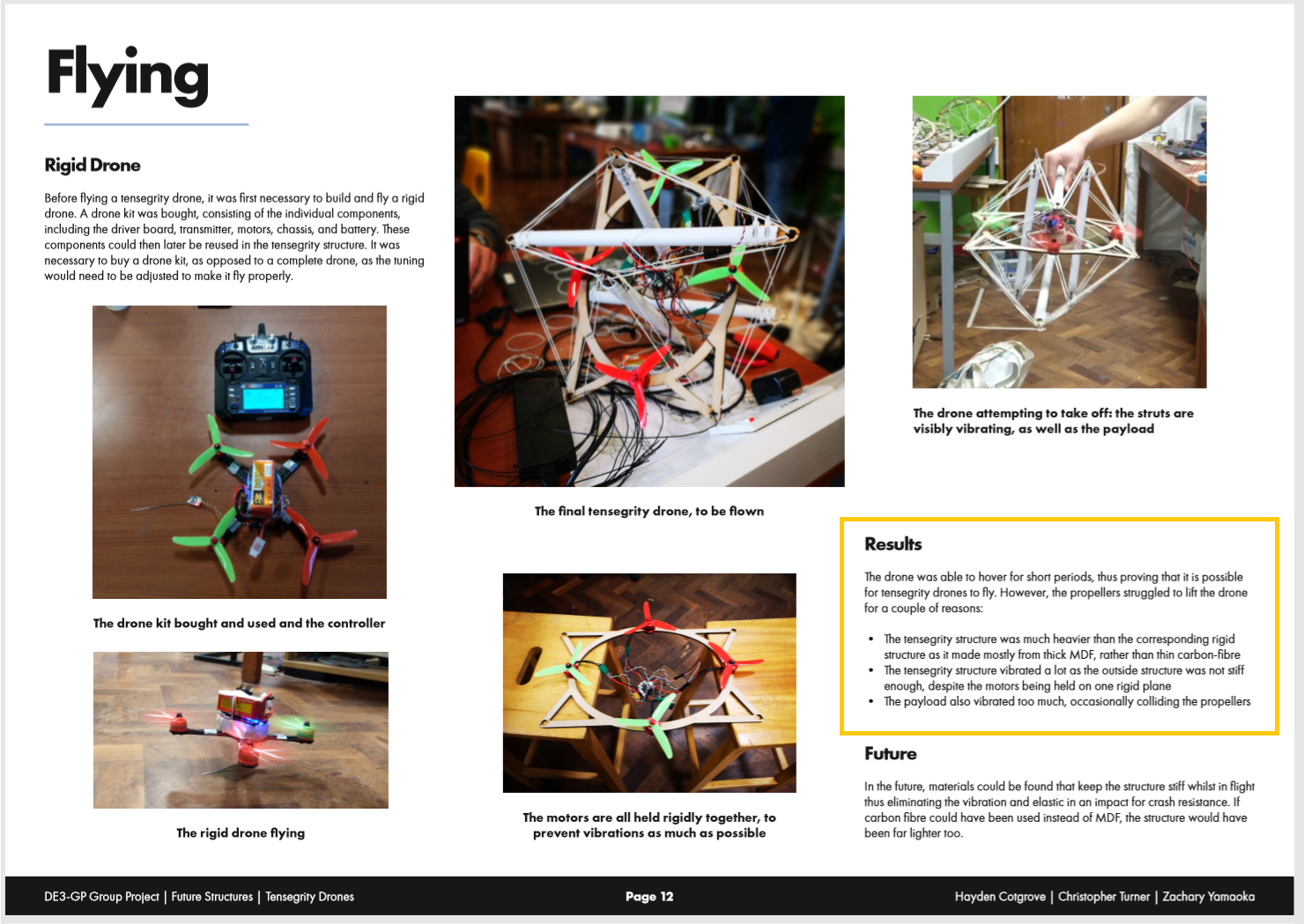
Отчет Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones. Ссылка уже не работает
Во-первых, прототип у них не полетел. Во-вторых, их конструкция — это жесткий дрон внутри тенсегрити-клетки, у нас же элементы дрона встроены в тенсегрити-структуру, которая тем самым является и фреймом и клеткой одновременно. Таким образом, здесь как концептуальные проблемы, так и проблемы качественной реализации.
Возвращаемся к проблемам управления и вибрации. Вот, что написано в отчете Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Еще в начале (почти год назад), когда мы делали прототип, мы нашли это видео от ребят из Imperial College London:
Авторы пришли к той же идее, что и мы: применение тенсегрити для дронов — это интересно.
Т.к. никаких подробностей по конструкции и, тем более, прототипа представлено не было, свои работы мы продолжили.
Уже потом, когда у нас был летающий образец, мы получили отчет той же группы:
Отчет Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones. Ссылка уже не работает
Во-первых, прототип у них не полетел. Во-вторых, их конструкция — это жесткий дрон внутри тенсегрити-клетки, у нас же элементы дрона встроены в тенсегрити-структуру, которая тем самым является и фреймом и клеткой одновременно. Таким образом, здесь как концептуальные проблемы, так и проблемы качественной реализации.
Возвращаемся к проблемам управления и вибрации. Вот, что написано в отчете Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Данные проблемы мы решаем с двух сторон — улучшением конструкции для уменьшения вибраций при полете и разработкой алгоритмов управления и оценивания состояния с целью подавления вибраций и более качественного управления, в том числе с учетом дополнительных данных от IMU датчиков на балках и динамической модели тенсегрити-структуры.
Падение на пол с последующим взлетом, в помещении (без монтажа)
Еще несколько видео испытаний
Вот еще несколько видео наших испытаний, когда вибрации уже на приемлемом уровне, для заинтересованных. Поместил в спойлер, т.к. уж очень их много.
Падение на ступеньки (и все ок)
Тест автоматического полета по миссии на улице
Демо полета в помещении с ударом об стену
Падение на ступеньки (и все ок)
Тест автоматического полета по миссии на улице
Демо полета в помещении с ударом об стену
Что дальше?
Ресерч
Впереди еще много интересного:
Применение
Сейчас эта штука летает сама по заданной миссии (в том числе по GPS на улице, а в помещении — будем использовать визуальную одометрию). Для нас очевидно дальнейшее применение для инспекции помещений.
За исключением управления низкого уровня и формы, тенсодрон — это обычный дрон, мы интегрируем в него наши алгоритмы планирования движения для автономного обследования и картографирования помещений (exploration) с обходом препятствий.
Пример выполнения автоматической инспекции. Магистерский проект Виктора (Victor Massague), нашего выпускника и в ближайшем будущем, надеюсь, сотрудника из Барселоны
И снова ресерч
Потенциал конструкции тенсегрити-дрона гораздо больше простого дрона.
Помните Foldable Drone из видео выше? А SUPERball?
Так вот, если активно изменять длины стержней или натяжения тросов тенсегрити-дрона, можно управлять его конфигурацией (или, проще говоря, формой)!
Получается Foldable Morphing Tensodrone. Активно ведем исследования в этой области.
Тенсодрон с изменяемой в полете геометрией Университета Иннополис (концепт)
Применение тенсегрити для летательного аппарата открывает новые исследовательские задачи. Прототип конструкции уже сейчас показывает, что идея работает и её можно применять для защиты БПЛА.

