
Дело было вечером, делать было нечего (с)
Достаточно давно я приобрёл квадрокоптер DJI Spark, много снимал всевозможных видео, над водой (один раз утопил его, купил такой же) и над другими, более безопасными поверхностями.
В один прекрасный день, когда делать было практически нечего, я обратил своё внимание на воздушный винт сабжа. Он мне показался каким-то не вполне правильным в плане геометрии и я подумал, а что если сделать свой воздушный винт, который был бы лучше родного от DJI.
Логика подсказывает, что необходимо выполнить серию расчётов разных винтов. Но как и где взять отправную точку и что должно меняться в серийных расчётах?
Воздушный винт представляет из себя конструкцию, состоящую из одной или более лопастей. Лопасть состоит из набора профилей, установленный под определённым углом.

Взяв коптер и вооружившись линейкой я совершенно однозначно смог определить, что диаметр воздушного винта составляет примерно 117 мм.

Один параметр мы знаем. Второе что необходимо определить - это обороты воздушного винта, при которых коптер висит (не меняет свою высоту). Сделать это не сложно оптическим тахометром с источником постоянного света (в данном случае это был фонарик от телефона).

Ну и третье, что доступно обывателю - определение тяги воздушного винта при висении коптера, а именно этот режим работы основной при использовании мной данного летательного аппарата. Зная массу DJI Spark (320г) и взяв за основу, что DJI молодцы и поместили центр тяжести в геометрический центр коптера, определим тягу одного винта как четверть от взлётной массы летательного аппарата=80гр.
В принципе, этих данных достаточно для начала работы. Но возникает вопрос, какой профиль выбрать и какие углы установки у каждого из профилей должны быть?
На первый вопрос нам поможет ответить замечательный сайт с базой данных профилей, откуда и был выбран профиль ah79100c-il. Почему он...просто понравился, а ещё у него неплохое соотношение Cy к Cx.
Со вторым вопросом сложнее. Если у нас безграничные вычислительный мощности, то можно построить лопасть из 10 профилей и для каждого профиля задать по 20 вариантов установки углов. В таком случае необходимо будет рассчитать 1.024e+13 вариантов лопастей. Согласитесь, это что-то за гранью разумного. Вариант второй - взять штатную лопасть воздушного винта и измерить углы. Или третий вариант - вычислить, скажем так, начальные условия лопасти воздушного винта.
Для этого я воспользовался книжкой, которую написал Борис Николаевич "Аэродинамический расчёт вертолётов".

Благодаря чему удалось создать документ в excle для определения параметров воздушного винта (больше интересует форма и углы установки профилей).

Немного пришлось "подкрутить" - коэффициенты в формуле для определения формы лопасти в плане (при виде сверху), лопасть изначально получалась очень узкая. И, тем не менее, результат расчёта очень далёк от реальности. В частности, получить 172г тяги, затратив 15 Вт мощности - что-то нереально и за гранью фантастики (эффективность 11 г/Вт). Поправка - в указанных габаритах и оборотах. Есть примеры из жизни, где получают эффективность воздушного винта порядка 133 г/Вт.
Вот теперь отправные углы для построения лопасти получены и нужно скорее строить лопасть воздушного винта, ну и винт потом. Проводить расчёты буду в программке Star-CCM, в ней и строю параметрическую 3D модель воздушного винта.

Теперь можно запускать расчёт. Я задал по несколько значений углов для каждого профиля и, всё равно, количество вариантов очень много (4608 вариантов). Расчёт был запущен, я сидел и ждал, точнее жил и ждал, потому как процесс не из самых быстрых, особенно учитывая, что расчёт проводил на домашнем ноутбуке.

Через некоторое время расчёт я остановил по причине бессмысленности его продолжать. Дело в том, что, судя по графикам, параметры лопасти стали смещаться в сторону увеличения тяга и уменьшения эффективности от искомых значений, что меня не устраивало.

Это неплохо) Я выбрал наиболее подходящий график и, соответственно, относящиеся к нему углы установки профилей лопасти и построил новую таблицу, уже с меньшим количеством вариантов. Чем дальше от центра вращения, там шаг меньше и больше вариантов, подумал я и получилась такая таблица.

Спустя неделю, а именно столько понадобилось моему хиленькому ноутбуку для расчёта всех вариантов я смог провести анализ полученных результатов и выбрать лучший из них. Тут стоит сказать, что сетка была не самая наилучшая. Чуть точнее сетка и расчёт занял месяц или ещё больше).
Вот такая лопасть показала наилучший результат после расчётов. Да, кривая, да, необходимо будет поправить, чтобы красивая была и провести окончательный расчёт.
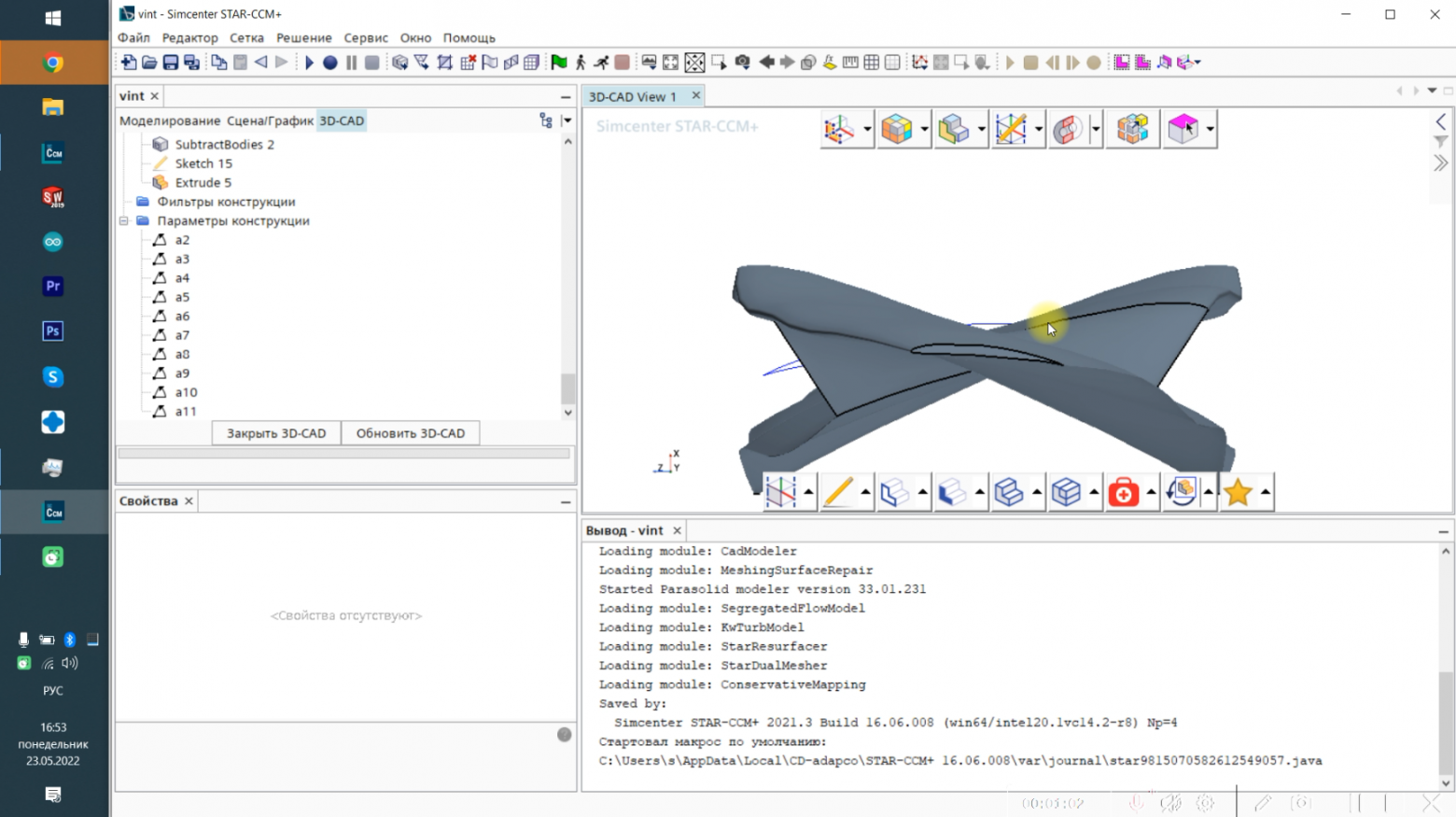
Правка заключается в изменениях углах установки, чтобы лопасть смотрелась целостно, без резких перегибов.

Подобные картинки (только с лучшим разрешением) любят вставлять во всякие отчёты. Выглядит красиво и прекрасно, на этом всё))
Графики сходимости эффективности:

и тяги рассчитанного воздушного винта.

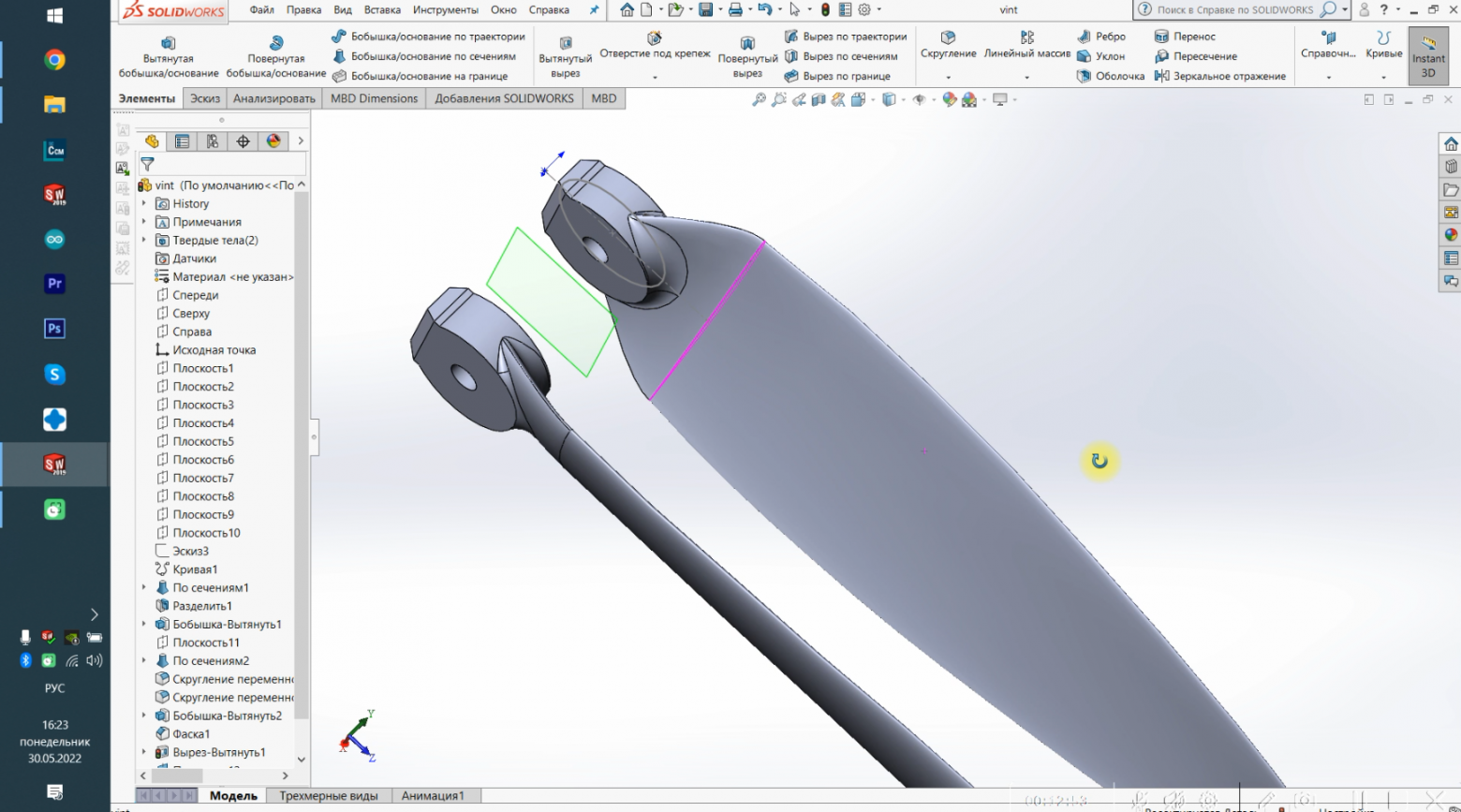
На этом расчёт воздушного винта окончен. Теперь осталось его изготовить и проверить на практике. Изготавливать я его методом 3D печати на фотополимерном принтере. Но, для этого необходима 3Д модель. Я её нарисовал в SW на основе рассчитанных данных. Получилось так. На изображении "комплект" лопасть правого вращения и лопасть левого вращения. Всего необходимо напечатать 4 таких комплекта.
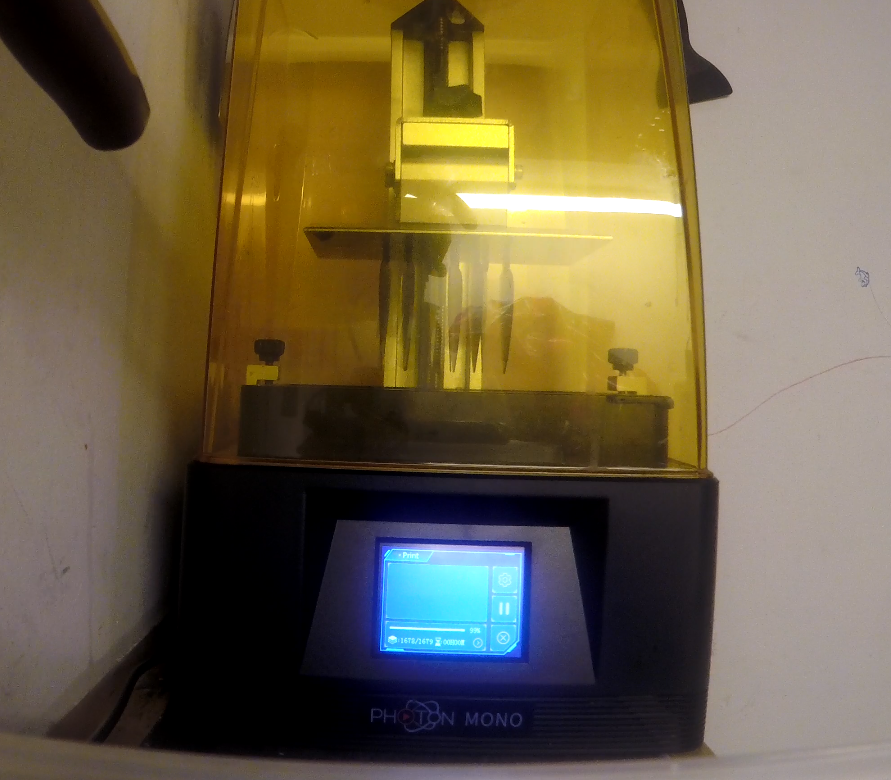
Процесс печати лопастей.
Сборка воздушного винта.
Тут всё предельно просто, берём родной воздушный винт, выбиваем оси и демонтирую лопасти. Устанавливаю самодельные лопасти, запрессовываю оси. На фото ниже уже собранный воздушный винт с самодельными лопастями.

Собираю три оставшихся воздушных винта и можно приступать к экспериментам.

Методика испытаний следующая:
Заряжаю АКБ.
Устанавливаю воздушный винт, подвергающийся испытанию.
Взлетаю на высоту 2 метра равноудалённо от стен.
Жду того момента когда коптер начнёт сигнализировать о низком уровне заряда АКБ и начнёт снижаться на посадку.
Посадку отменяю и уже на высоте 0,3 метра жду когда он принудительно приземлится из-за невозможности продолжать полёт.
Время между началом п.3 и концом п.5 и есть время полёта для сравнения воздушных винтов. А так как у меня есть 2 АКБ, то для каждого воздушного винта я проведу по 2 испытания.
А теперь результаты:
Родные воздушные винты
13 мин 21 сек (801 сек) - первая АКБ
13 мин 35 сек (815 сек) - вторая АКБ
Самодельные воздушные винты
14 мин 14 сек (854 сек) - первая АКБ
14 мин 33 сек (873 сек) - вторая АКБ
Прирост времени полёта.
Первая АКБ 6,6%
Вторая АКБ 7,1%
И немного выводов:
Удалось повысить эффективность воздушных винтов на 7%.
Можно выиграть ещё немного, за счёт изготовления жёстких винтов (напечатанные, всё таки, "мягковаты"). Об этом в следующей части, если будет интересно.
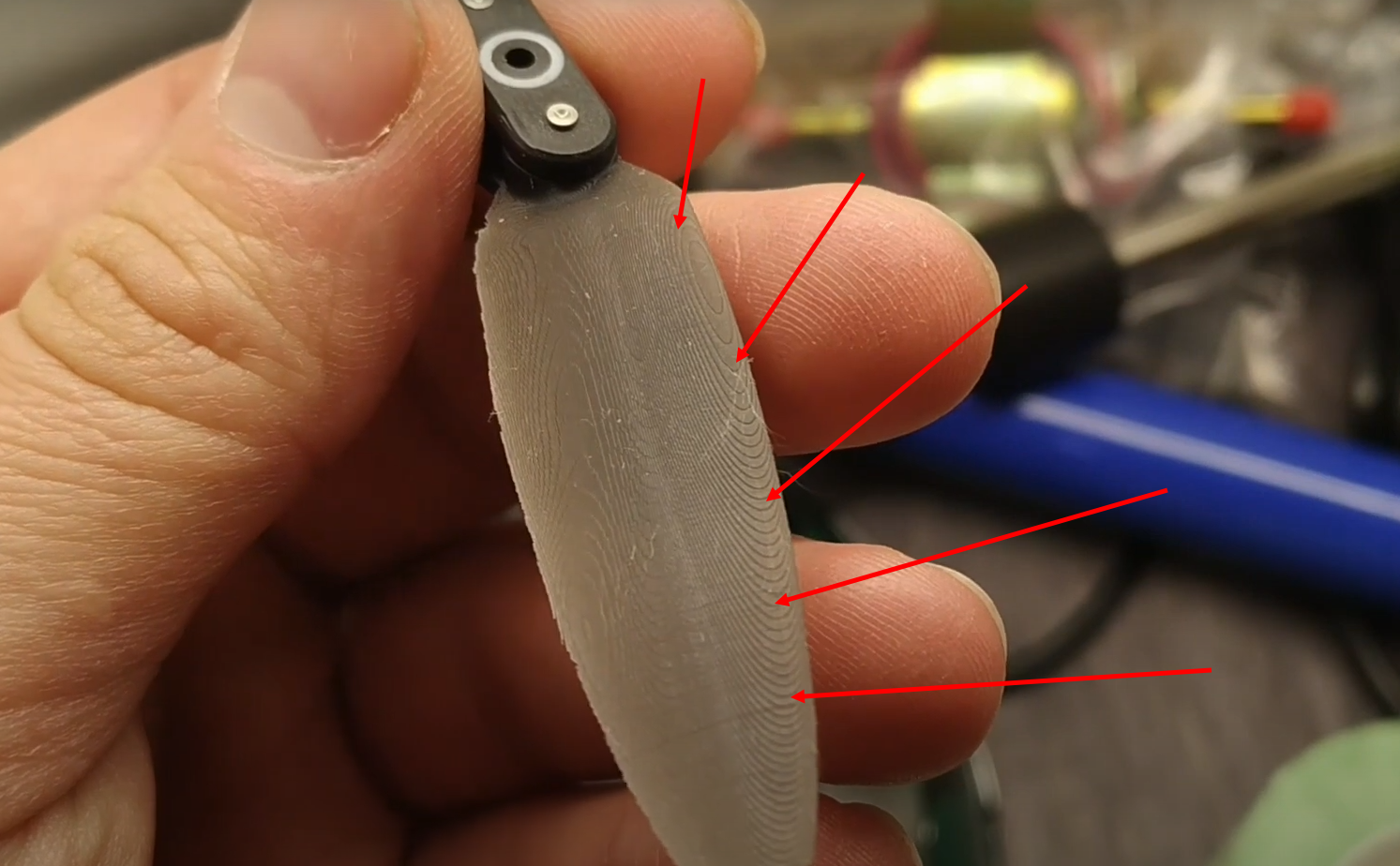
При печати на лопасти остаются ступеньки из-за недостаточно разрешения 3D принтера, если их убрать будет лучше.
Видеоверсия (немного другое, отличное от текстовой версии, представление информации): Ссылка
Скачать файл для печати можно по ссылке:
https://t.me/sergiv_spb/13




