
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!
Одна из самых сложных, малоизученных и загадочных систем — это мозг человека. На данный момент мы уже знаем гораздо больше об этом органе, чем сто или двести лет тому назад, но тайны и неотвеченные вопросы еще остаются. Одним из самых необычных умений мозга является когнитивное восприятие какого-либо инструмента в качестве продолжения тела человека. Так часто говорят о фехтовании, когда меч должен быть продолжением руки, чтобы полноценно им овладеть. И вот группа ученых из Токийского университета, технологического университета Тоёхаси и университета Кэйо (Япония) провели любопытные опыты, во время которых испытуемые управляли виртуальной дополнительной конечностью. Легко ли было испытуемым адаптироваться, и о чем свидетельствуют результаты экспериментов? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
В медицине существует такое понятие как «лишняя часть тела». Примеров таких врожденных особенностей достаточно много: шесть пальцев на руке, третья грудь, лишнее ребро, третья почка и т. д. Любопытным является то, что мозг человека, хоть и предназначенный для управления, к примеру, двумя почками, в таких случаях абсолютно нормально работает, когда почек три. Другими словами, существует определенная степень когнитивной предрасположенности к адаптации и пластичности восприятия.
С развитием вычислительной техники ученые все больше внимания уделяют изучению роботизированных лишних конечностей (SRL от supernumerary robotic limb), когда человек, обладающий стандартным набором органов, получает в свое распоряжение дополнительную конечность (к примеру, руку). В такой ситуации врожденной адаптации к лишней руке нет, ибо человек с ней не родился, а приобрел ее. А потому возникает масса вопросов касательно возможности мозга адаптироваться к новой конфигурации тела. Такие исследования крайне важны, если в будущем люди хотят управлять сложными роботизированными системами, используя при этом исключительно свой мозг.
Ученые считают, если создать состояние, в котором когнитивная нагрузка во время движения тела подавляется (то есть обеспечивается когнитивная прозрачность), можно достичь восприятия чужеродной конечности, как своей собственной. Фактически, когда когнитивная нагрузка высока, качество и точность манипуляции снижаются. Учитывая конструкцию системы SRL, если когнитивную рабочую нагрузку можно контролировать, система будет работать без проблем для оператора, и ее можно будет рассматривать как часть тела.
В когнитивистике известно, что человеческое восприятие может быть преобразовано, если оно в достаточной степени применялось к какому-то инструменту, что приводит к восприятию инструмента как части своего тела. Этот эффект называют «слияние с инструментом» (tool embodiment).
Тут можно провести пример с вышеупомянутым мечом. Талантливый фехтовальщик не воспринимает меч как отдельный предмет, который он держит в руке, он воспринимает его как продолжение руки. Но тут есть физический контакт с мечом, чего не будет, если инструментом управлять силой мысли. Такая же ситуация наблюдается и с незрячим человеком, для которого трость является частью его тела.
Рассматривая это явление с точки зрения когнитивистики, важно понять, могут ли внешние инструменты быть включены в нашу схему тела и образ тела. Схема тела — это перцептивная модель, созданная на основе сенсорных сигналов, таких как движение и поза, и используется для управления движениями и движениями тела. А вот образ тела представляет собой внутреннюю модель тела, построенную на основе визуальной информации и используемую для вынесения суждений о восприятии. Эти модели пытаются интерпретировать восприятие тела как с моторной, так и с перцептивной точек зрения и могут быть изменены не только врожденной конструкцией тела, но также внешними инструментами и влияниями окружающей среды.
При обсуждении слияния с инструментом основными объяснительными переменными и элементами в области когнитивистики являются чувство владения телом (SoO от sense of body ownership), чувство действия (SoA от sense of agency) и чувство собственного местоположения (SoSL от sense of self-location). В одном из ранее проведенных исследований ученые высказали мнение, что минимальное «я» как единица самосознания состоит именно из SoO и SoA.
Чувство владения телом относится к состоянию, в котором человек воспринимает и эмоционально реагирует на объект, как будто это его собственное тело. Это один из основных элементов слияния с инструментом. Иллюзия резиновой руки (RHI от rubber hand illusion) — типичный исследовательский пример чувства владения телом. SoA (чувство действия) — это состояние, в котором человек может чувствовать, что результат действия является его собственным.
Иллюзия резиновой руки на практике.
Еще одним объяснительным параметром эффекта слияния с инструментом является периперсональное пространство (PPS от peripersonal space), относящееся к пространству, окружающему тело, где могут непосредственно восприниматься стимулы из внешнего мира. Люди воспринимают его посредством интеграции нескольких сенсорных модальностей, таких как зрение, осязание и слух. Кроме того, пространственное представление в мозгу считается трехмерным и известно как когнитивное восприятие более высокого порядка. Также периперсональное пространство и схема тела тесно связаны и, как считается, влияют на трансформацию движений тела.
Во многих исследованиях сообщалось об изменениях восприятия типа «замена» или «расширение» в контексте слияния с инструментом, в то время как изменения типа «добавление» описываются крайне редко. Например, иллюзия лишней руки, которая является расширенным вариантом иллюзии резиновой руки, реализуется добавлением дополнительной конечности — резиновой или виртуальной руки (и/или пальцев). В этой экспериментальной парадигме испытуемому предъявляют как его собственные руки, так и резиновую руку, а визуальные и тактильные стимулы, подобные тем, что возникают в иллюзии резиновой руки, даются одновременно для дублирования восприятия. В результате испытуемый может ощущать резиновую руку, при этом не теряя ощущения своих собственных (в опытах с иллюзией резиновой руки происходило замещение восприятия).
В рассматриваемом нами сегодня труде ученые разработали систему SRL, работающую в VR среде, и оценили, можно ли считать искусственные дополнительные конечности частью собственного тела и какие перцептивные изменения происходят при использовании системы (изображение №1).
Результаты исследования
В ходе исследования ученые сосредоточили основное внимание на четырех измерениях:
- анализ обучающей задачи системы SRL;
- анализ кроссмодального эффекта конгруэнтности (CCE от crossmodal congruency effect) времени реакции, собранная во время задачи на кроссмодальную конгруэнтность (CCT от crossmodal congruency task);
- анализ анкет испытуемых для оценки изменений восприятия SRL;
- анализ корреляции между оценкой CCE и оценкой изменения восприятия.

Изображение №1
В первом опыте испытуемые должны были касаться мячика в виртуальной среде с помощью SRL, т. е. виртуальной роботизированной дополнительной конечности. Это задание было нацелено на обучение испытуемых пользованию системой. Каждый испытуемый должен был 100 раз (за один заход) прикоснуться к шарику, положение которого случайным образом менялось.
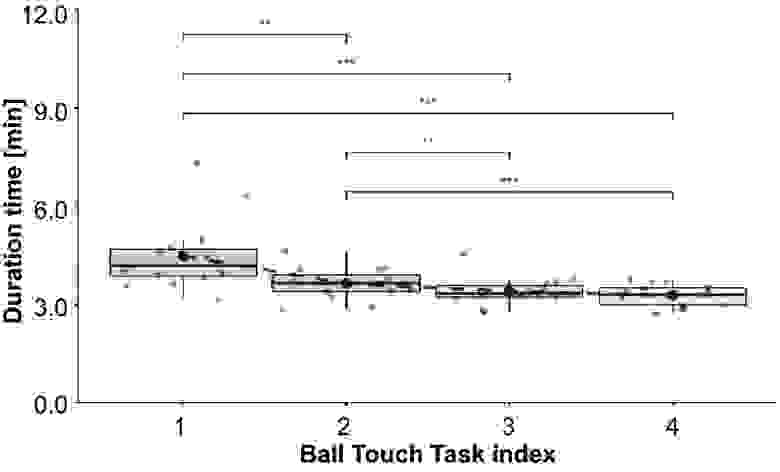
Среднее время, необходимое для выполнения одного захода, было проанализировано для определения тенденции выполнения задания на касание мяча. Дабы исключить из анализа случаи, когда шарик появлялся в одной и той же точке несколько раз подряд или когда испытуемому требовалось слишком много времени, попытки менее 0.5 секунд или более 10 секунд не учитывались в анализе.
Изображение №2
В начале опыта испытуемым требовалось достаточно много времени, чтобы адаптироваться к выполнению задания. Однако уже во второй половине теста они привыкали и выполняли задачу достаточно быстро (график выше). В результате среднее время, необходимое для выполнения задания за один заход (100 касаний), составило 3.7 ± 0.8 минуты. Среднее время выполнения задачи составило: в первом заходе 4.5 ± 1.1 минуты; во втором — 3.6 ± 0.5 минуты; в третьем — 3.4 ± 0.4 минуты; в четвертом — 3.3 ± 0.3 минуты.
Задача кроссмодальной конгруэнтности (CCT) использовался для оценки того, наблюдается ли сильная интеграция зрительных и тактильных ощущений в периперсональном пространстве вокруг дополнительных роботизированных рук до и после обучающего этапа. Поскольку визуальный дистрактор, не относящийся к задаче, был представлен в непосредственной близости от виртуальных роботизированных рук, в качестве данных для анализа были собраны время реакции (RT от reaction time) и точность ответов на тактильные стимулы, предъявляемые к пальцам ног.
Дабы учесть тот факт, что некоторые ответы могут быть неверными, для статистического анализа и расчета баллов CCE использовался обратный эффект (IE от inverse effect), который представляет собой время реакции, деленное на коэффициент точности правильных ответов для каждого условия.
Средние значения времени реакции, основанной на обратном эффекте (IE-RT), были проанализированы с использованием внутрисубъектного трехфакторного повторного измерения ANOVA, где тремя факторами были вертикальная конгруэнтность положения предъявления стимула, лево-правая латеральная конгруэнтность положения, а также состояние перед и после обучения.
Изображение №3
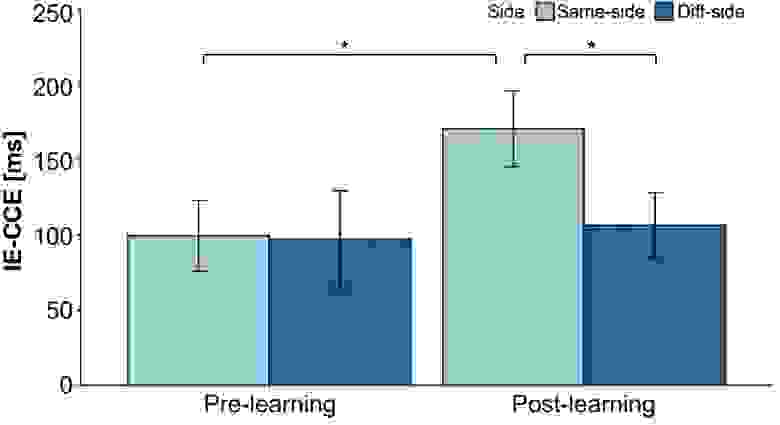
Поскольку в средних IE-RT было обнаружено трехфакторное взаимодействие, был проведен апостериорный анализ для изучения показателей кроссмодального эффекта конгруэнтности на основе обратного эффекта (IE-CCE) и эффектов, наблюдаемых между состояниями «до» и «после» обучения.
Результаты анализа показали значительную разницу между состояниями «до» и «после» обучения, а также между восприятием «той же» и «другой» сторон после обучения. Для остальных состояний статистически значимых различий обнаружено не было. Это означает, что баллы IE-CCE значительно увеличились после обучения использованию дополнительных роботизированных конечностей только тогда, когда тактильный стимул предъявлялся ипсилатерально (т. е. стимул был на той же стороне, что и задействованная конечность).
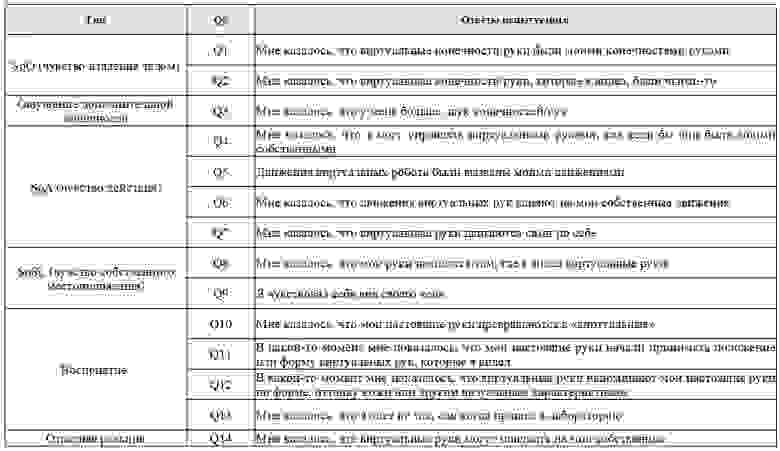
Таблица №1
Далее испытуемым было предложено заполнить анкету, в которой они могли описать свои ощущения восприятия дополнительной конечности до и после тестов (таблица выше).

Изображение №4
На графике выше показаны результаты опроса до и после обучения. Статистически значимые различия наблюдались в Q1, Q2, Q3, Q4, Q5, Q6, Q8, Q11. Наблюдалась тенденция того, что участники, как правило, испытывали чувство владения телом (Q1, Q2, Q3), чувство действий (Q4, Q5, Q6) и чувство собственного местоположения (Q8) после обучения.
Далее ученые сопоставили оценку IE-CCE со словами испытуемых до и после обучения. Несмотря на то, что в испытаниях принимали участие всего 15 человек, чего недостаточно для проведения полноценного корреляционного анализа, этого достаточно для проведения анализа методом начальной загрузки.

Изображение №5
В результате была выявлена положительная корреляция между оценкой IE-CCE и степенью изменения субъективного восприятия Q3 (график слева). Также была положительная корреляция между Q1, который относится к ощущению владения телом по отношению к SRL, и Q4 который относится к ощущению свободы действий по отношению к SRL (график справа).
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые решили провести любопытный тест, в котором испытуемые должны были касаться виртуального шарика виртуальной конечностью. Этот эксперимент был нацелен на оценку восприятия человеком дополнительных конечностей. Такой эффект называют слиянием с инструментом. Когда человек долгое время работает с каким-то инструментом (например, художник с кистью), то он начинает воспринимать этот инструмент не как отдельный объект, а как некое продолжение его собственного тела.
В ходе опытов было видно, что испытуемым крайне непривычно управлять виртуальной дополнительной конечностью. Но этот дискомфорт и неуверенность постепенно снижались с каждым последующим тестовым заходом, что говорит о наличии когнитивной адаптации. Оценка результатов тестов и их сопоставление с ответами, которые испытуемые дали на специальный опросник, показала наличие положительной корреляции между длительностью обучения и ощущением слияния с виртуальной конечностью. Многие испытуемые спустя некоторое время начинали воспринимать виртуальные руки, как часть собственного тела, «ощущая» их положение и перемещение в пространстве.
Авторы исследования считают, что результаты, наблюдаемые в ходе опытов, с точки зрения когнитивной нейробиологии будут иметь важное значение для изучения пределов пластичности человека и разработки систем дополнительных роботизированных конечностей. Если нам удастся понять перцептивные изменения и когнитивные усилия, необходимые для управления дополнительной роботизированной системой конечностей в виртуальной реальности, в будущем это поможет в разработке реальных систем, которые люди смогут использовать естественным образом так же, как свое собственное тело. Ведь создать дополнительные манипуляторы, как у доктора Отто Октавиуса, не является проблемой. Но вот достичь того уровня контроля, который он имел над ними, уже куда более сложная задача.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?




