
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!

Команда CoSTAR с четвероногим роботом SPOT mini выиграла этап Urban Circuit соревнования DARPA Subterranean Challenge!
Соревнования роботов эволюционируют
Управление перспективных исследовательских проектов Министерства обороны США (Defense Advanced Research Projects Agency, DARPA) — агентство, отвечающее за разработку новых технологий для использования в интересах вооружённых сил. Согласно цитате с сайта DARPA, «для обеспечения сохранения технологического превосходства вооружённых сил США, предотвращения внезапного для США появления новых технических средств вооружённой борьбы, поддержки прорывных исследований, преодоления разрыва между фундаментальными исследованиями и их применением в военной сфере, агентство проводит целый ряд мероприятий, в том числе соревновательных среди робототехнических компаний». DARPA Subterranean Challenge (подземные соревнования) — одно из таких мероприятий.
Соревнование беспилотных автомобилей “Зимний город” показало, что команды применяли уловку, использовали для локализации на трассе GPS и не заезжали на те участки трассы, где его сигнал недоступен, тем самым обесценивая идею выявить уровень готовности технологии беспилотников. В соревновании DARPA Subterranean Challenge действие происходит под землей исключая саму возможность использовать GPS, а также на маршруте присутствуют другие препятствия которые вызываю сейчас проблемы для роботов и ИИ: плохое освещение, неструктурированная среда, лужи, лестницы между этажами и т.д. Задача состоит в том чтобы роботы автономно исследовали подземелье и находили определенные предметы, за что им начисляются баллы. Таким образом, DARPA Subterranean Challenge заставляет искать новые подходы для быстрого картографирования, навигации и поиска в подземных средах во время чувствительных ко времени боевых операций или сценариев реагирования на бедствия.

27 февраля команда CoSTAR с четвероногим шагающим роботом SPOT заняла первое место в этапе Urban Circuit соревнования DARPA Subterranean Challenge, а команда CERBERUS со своим четвероногим шагающим роботом ANYmal заняла пятое, при этом, шагающие роботы впервые используются в таких соревнованиях.
Анализ победы и технологий команды CoSTAR
1. Для того, чтобы роботы были по-настоящему автономными в условиях перемещения в подземельях без доступа к GPS сигналу, команда разработала фреймворк NeBula с применением fuse данных с различных сенсоров и выявления аномалий в них с помощью ML. Применение новой технологии позволит роботам выполнять ответственные задания в автономном режиме в сложных условиях, которые сейчас еще «не по зубам» сегодняшнему поколению роботов и беспилотных транспортных средств. Важно, что данный фреймворк NeBula реализован в Robot Operating System (ROS), который является одной из базовых технологий в Лаборатории робототехники Сбербанка и который активно развивается через сообщество разработчиков. Очередная встреча нескольких сотен инженеров ROS пройдет в Сбербанке 18 апреля.
2. Преодоление человеческой инфраструктуры и неструктурированной среды, например такой как лестничные пролеты, на текущий момент является для роботов серьезной проблемой. На участке с переходом по лестничному пролету между этажами, робот SPOT продемонстрировал свои возможности наилучшим образом (короткий отрывок, где робот спускается по лестнице). Прохождение такого теста говорит о том, что теперь становится возможным создание более сложных автономных роботов для перемещений одновременно как на улице по сложной местности, так и внутри не подготовленных для роботов помещений.
Анализ команды CERBERUS
Видео: робот ANYmal спускается по лестнице
ANYmal в том числе является исследовательской платформой на которой ведутся открытые исследования и пишутся научные статьи, одним из последних подходов который был применен в соревнованиях описан в статье “Learning agile and dynamic motor skills for legged robots”. Он заключается в том что был предоставлен подход к решению проблемы машинного обучения в симуляторе и в реальности. Нейросеть обучили на основе математической модели движения ног и данных собранных с реального робота, затем обучили другую нейросеть на основе предсказаний первой нейросети в симуляторе. Гибридный симулятор оказался быстрее и точнее чем симулятор на аналитических моделях. Но что еще более важно, когда стратегия передвижения была оптимизирована в гибридном симуляторе, а затем перенесена в настоящего робота и протестирована в физическом мире, она оказалась такой же успешной, как и в симуляции. Этот давно назревший прорыв сигнализирует о закате, казалось бы, непреодолимого разрыва в обучении нейросетей между симуляцией и реальностью.
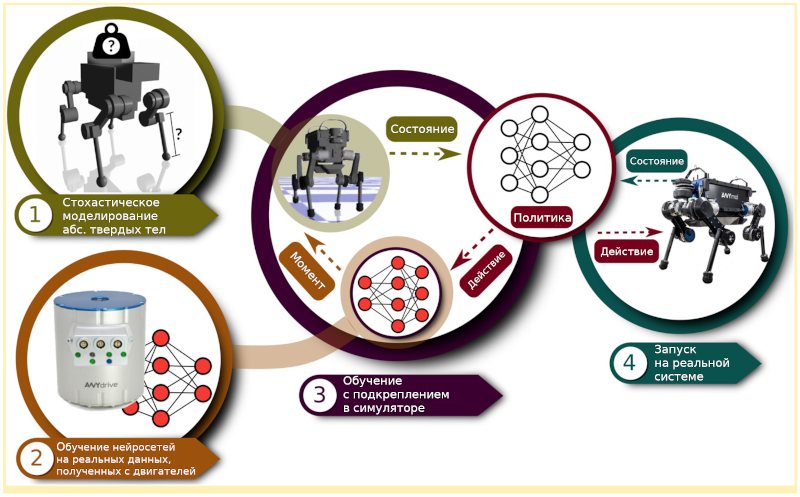
Используемый подход намекает на еще один важный сдвиг в области робототехники. Гибридные модели — первый шаг к этому изменению. Следующим шагом будет отказ от аналитических моделей в целом в пользу моделей машинного обучения, которые обучаются с использованием данных, собранных в реальной среде робота. Такие подходы, основанные на данных, называемые end-to-end, набирают силу.
Также развитие подобных подходов поможет приблизиться к решению задач AGI по примеру того как ребенок учиться ходить. Таким образом изучение роботизированного программного обеспечения может дать представление о давних вопросах о человеческом уме.
Можно предположить, что самосознание и следовательно сознание, по своей сути, являются показателем нашей способности мыслить о себе абстрактно — самовыражаться. Чем дальше человек может смотреть вперед, и чем более детально будет ментальная картина его будущей деятельности, тем выше будет способность этого человека к самосознанию. Теперь роботы способны учиться самостоятельно моделировать. Этот прорыв является не только практическим достижением, которое сэкономит некоторые инженерные усилия, но и началом эпохи автономии роботов.
Авторы статьи: Альберт Ефимов, Алексей Бурков, Виктор Цыганков
Лаборатория робототехники Сбербанка



