
MIRA, что расшифровывается как «миниатюрный роботизированный ассистент на месте» [miniaturized in vivo robotic assistant], недавно стал первым хирургическим роботом на Международной космической станции (МКС).
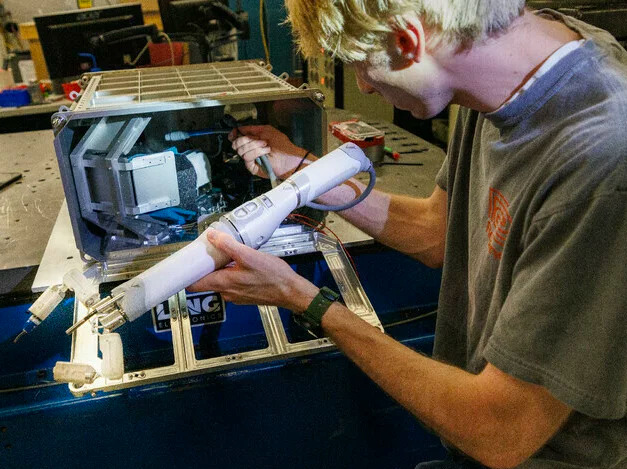
Крошечный робот весом около килограмма прибыл на космическую станцию 1 февраля. В течение следующих нескольких недель робот-ассистент будет практиковаться в работе в условиях невесомости. Разработчики планируют использовать MIRA для симуляции хирургических операций с помощью дистанционного управления, когда хирург будет направлять его движения на расстоянии.
"Робот способен имитировать работу с хирургическими тканями с натяжением, которое позволяет проводить препарирование", - поясняется в релизе Университета Небраски. Робот "будет использовать левую руку для захвата, а правую - для разрезания, как человек-хирург в больничной операционной".
Робот был разработан компанией Virtual Incision Corporation, расположенной в Линкольне, штат Небраска. Его создание стало возможным благодаря партнёрству между НАСА и Университетом Небраски.
Потенциально космическая миссия может помочь проложить путь для медицины в дальних космических путешествиях, но изобретатели MIRA надеются, что их версия роботизированной хирургии принесёт наибольшую пользу здравоохранению на Земле, особенно в районах, где нет доступа к местным хирургам.
"Когда мы начинали эту работу в Университете Небраски, у нас было общее видение того, что miniRAS может сделать роботизированную хирургию доступной для любого пациента, в любое время и в любом месте", - говорит Шейн Фарритор, соучредитель компании Virtual Incision. "Изучение возможности использования miniRAS в экстремальных условиях помогает нашим командам понять, как мы можем устранить барьеры для пациентов".

")


