
Примечание. 16 июля 2019г. Илон Маск презентовал технологию, которая стала одной из первых серьезных попыток введения нейроинтерфейсов в клиническую практику и имеющая реальные трансгуманистические цели в долгосрочной перспективе. Данная статья является переводом, с некоторыми примечаниями, оригинальной статьи (https://www.biorxiv.org/content/10.1101/703801v2.full) описывающей технологию нейрокомпьютерного интерфейса, ссылка на которую так же размещена на сайте компании разработчика Neuralink (https://www.neuralink.com/). Статья содержит описание особенностей и характеристик основных модулей лежащих в основе данной технологии, в том числе: гибких биосовместимых микроэлектродов, роботизированного нейрохирургического манипулятора для введения электродов в мозг, а так же специализированной микроэлектроники обеспечивающей прием усиление и оцифровку сигнала поступающего от нейронной активности.
Аннотация
Нейрокомпьютерные интерфейсы (BMI — brain-machine inteface) дают возможность для восстановления сенсорной и двигательной функции, а так же лечения неврологических расстройств, но до сих пор BMI еще не получили широкого клинического распространения, отчасти по причине недостаточного количества каналов, которое ограничивало их потенциал. В этом техническом документе мы описываем первые шаги Neuralink к масштабируемой широкополосной системе BMI. Мы создали массивы из маленьких и гибких «нитей» — электродов, в которых до 3072 электродов распределено по 96 нитям. Мы также создали нейрохирургического робота, способного вживлять шесть нитей (192 электрода) в минуту. Каждая нить может быть вставлена в мозг индивидуально с точностью до микрона, чтобы избежать повреждения поверхностной сосудистой сети и достигнуть цели в точно определенной области мозга. Массив электродов упакован в небольшое имплантируемое устройство, которое содержит специальные микросхемы для маломощного встроенного усиления и оцифровки сигнала: пакет для 3072 каналов имеет габариты 23 × 18,5 × 2 мм и объем 0,851 см3. Один кабель USB-C обеспечивает потоковую передачу данных с устройства с полной полосой пропускания и одновременную запись со всех каналов. До 85,5% вживленных электродов регистрировали непосредственно пики активности нейронов. Подход Neuralink к BMI имеет беспрецедентную плотность электродов и масштабируемость, в сборке позволяющей клиническое применение.
1. Введение
Интерфейсы мозг-машина (BMI — Brain-Machine Interface) могут помочь людям с широким спектром клинических расстройств. Например, исследователи продемонстрировали возможность управления с помощью нейропротезирования компьютерными курсорами [1, 2, 3], роботизированными конечностями [4, 5] и синтезаторами речи [6] с использованием, во всех этих примерах, не более 256 электродов. В то время как эти успехи говорят о том, что передача информации высокой точности между мозгом и машинами возможна, развитие BMI было критически ограничено неспособностью записывать сигналы от большого числа нейронов. Неинвазивные подходы могут регистрировать в среднем миллионы нейронов через череп, но этот сигнал искажен и неспецифичен [7, 8]. Инвазивные электроды, размещенные на поверхности коры, могут записывать полезные сигналы, но они ограничены в том, что они усредняют активность тысяч нейронов и не могут записывать сигналы в глубине мозга [9]. Большинство BMI используют инвазивные методы, потому что наиболее точное считывание нейронных представлений требует записи одиночных потенциалов действия нейронов в распределенных, функционально связанных ансамблях [10].
Микроэлектроды являются золотым стандартом технологий для записи потенциалов действия, но до сих пор не было клинически отработанной микроэлектродной технологии, которую можно было бы масштабировать для записи активности большого количества нейронов[11]. Для этого потребуется система созданная из материалов обладающих особыми свойствами, которые обеспечивают высокую биосовместимость, безопасность и долговечность. Кроме того, этому устройству также потребуются практичный хирургический подход и электронная аппаратура малой мощности и высокой плотности, чтобы в конечном итоге обеспечить полностью беспроводную работу имплантантов.
Большинство устройств для долговременной нейронной записи представляют собой массивы электродов из жестких металлов или полупроводников [12, 13, 14, 15, 16, 17, 18]. В то время как жесткие металлические решетки облегчают проникновение в мозг, размер, модуль Юнга, несоответствие жесткости при изгибе между жесткими зондами и тканями головного мозга могут стимулировать иммунные реакции, которые ограничивают функцию и долговечность этих устройств [19, 11]. Кроме того, фиксированная геометрия этих массивов ограничивает популяции нейронов, к которым можно получить доступ, особенно из-за наличия сосудистой сети.
Альтернативный подход заключается в использовании тонких гибких многоэлектродных полимерных зондов [20, 21]. Меньший размер и повышенная гибкость этих зондов должны обеспечивать большую биосовместимость. Однако недостатком этого подхода является то, что тонкие полимерные зонды недостаточно жесткие для того, чтобы непосредственно вставляться в мозг; их введение должно быть обеспечено ребрами жесткости [22, 21], инъекцией [23, 24] или другими подходами [25], причем все они довольно медленны [26, 27]. Чтобы удовлетворить функциональные требования для НКИ с высокой пропускной способностью, используя преимущества тонкопленочных устройств, мы разработали роботизированный подход, в котором большое количество тонких и гибких полимерных зондов эффективно и независимо вставляются в различные области мозга [28].
Здесь мы сообщаем о прогрессе Neuralink в создании гибкого, масштабируемого BMI, который увеличивает количество каналов на порядок по сравнению с предыдущей работой. Наша система состоит из трех основных компонентов: сверхтонкие полимерные зонды (раздел 2 настоящего отчета), нейрохирургический робот (раздел 3) и специализированная электроника высокой плотности (раздел 4). Мы демонстрируем технологию позволяющую быструю имплантацию 96 полимерных нитей, каждая из которых содержит 32 электрода, в общей сложности 3072 электрода.
Мы разработали миниатюрную специализированную электронику, которая позволяет нам одновременно передавать все данные широкополосной электрофизиологии со всех этих электродов (раздел 5). Мы упаковали эту систему таким образом что бы сделать возможной её длительную имплантацию и разработали специальное программное обеспечение для онлайн-обнаружения пиков активности нейронов, которое может обнаруживать потенциалы действия с низкой задержкой. Вместе эта система служит современной исследовательской платформой и первым прототипом полностью имплантируемого человеческого нейрокомпьютерного интерфейса.
2. Нити

Рисунок 1: Наши новые полимерные зонды (нити). A. Зонд «Линейный край», с 32 контактами электродов, разнесенными на 50 мкм. B. «Древовидный» зонд с 32 электродными контактами, расположенными на расстоянии 75 мкм. C. Увеличенное изображение отдельных электродов для конструкции A, подчеркивая их небольшую геометрическую площадь поверхности. D. Распределение импедансов электродов (измеренное при 1 кГц) для двух обработок поверхности: PEDOT (n = 257) и IrOx (n = 588).
Мы разработали индивидуальный процесс изготовления нейронных зондов с минимальным расстоянием между электродами, в которых используются разнообразные биосовместимые тонкопленочные материалы. Основной подложкой и диэлектриком, используемым в этих пробниках, является полиимид, который покрывает тонкую золотую пленку. Каждая тонкопленочная матрица состоит из области «нити», которая имеет контакты, дорожки электродов и области «датчика», где тонкая пленка соединяется с нестандартными микросхемами, которые обеспечивают усиление и приём сигнала. Процесс микропроизводства на уровне пластин обеспечивает их высокую производительность. На каждой пластине нанесено десять тонкопленочных устройств, которые принимают сигнал в общей сложности с 3072 электродных контактов.
На каждый массив подключено 48 или 96 нитей, каждая из которых в свою очередь содержит 32 независимых электрода. Интегрированные микросхемы соединяются с контактам в области тонкопленочного датчика с помощью процесса скрепления flip-chip(прим.:https://en.wikipedia.org/wiki/Flip_chip ).
Одной из целей этого подхода является достижение как можно меньшей площади поперечного сечения нити, чтобы минимизировать смещение ткани в мозге. Чтобы достичь этого, сохраняя при этом высокое число каналов, при получении металлической пленки с субмикронным разрешением используется пошаговая проекционная литография и другие методы микрообработки.
Мы разработали и изготовили более 20 различных типов нитей и электродов для наших массивов; два примера конструкции показаны на панелях A и B на рис. 1. Мы изготовили нити шириной от 5 до 50 мкм, которые включают места записи нескольких геометрий (рис. 1). Толщина нити составляет от 4 до 6 мкм, что включает в себя до трех слоев изоляции и двух слоев проводника. Типичная длина нити составляет около 20 мм. Перед введением на нити, наносится парилен-С, чтобы сформировать пленку, на которой нити остаются прикрепленными до тех пор, пока хирургический робот их не снимет. Каждая нить заканчивается петлей (16 × 50) мкм2 для приспособления к заправке в иглу.
Поскольку отдельные участки золотого электрода имеют небольшие геометрические площади поверхности (рис. 1C), мы используем модификации поверхности, чтобы снизить импеданс для электрофизиологии и увеличить эффективную несущую способность поверхности (рис. 1D). Две такие обработки, которые мы использовали, это электропроводящий полимерный полиэтилендиокситиофен, легированный полистиролсульфонатом (PEDOT: PSS) [29, 30] и оксидом иридия (IrOx) [31, 32]. В настольном тестировании мы достигли импедансов 36,97 ± 4,68 кОм (n = 257 электродов) и 56,46 ± 7,10 кОм (n = 588) для PEDOT: PSS и IrOx соответственно. Более низкий импеданс PEDOT: PSS является многообещающим, однако долгосрочная стабильность и биосовместимость PEDOT: PSS менее надежна, чем для IrOx. Эти методы и процессы могут быть улучшены и в дальнейшем распространены на другие типы проводящих электродных материалов и покрытий.
3. Нейрохирургический робот

Рисунок 2: Размер картриджа иглодержателя (NPC — Needle Pincher Cartridge) по сравнению с монетой в один пенни.
Тонкопленочные полимеры и ранее использовались для электродных зондов [21], но их низкая жесткость на изгиб усложняла процесс вставки. Neuralink разработал подход с роботизированной вставкой гибких зондов [28], позволяющий быстро и надежно вводить большое количество полимерных зондов, нацеленных на то, чтобы не повредить сосудистую сеть и записи из небольших областей мозга. Иньекционная головка робота позиционируется с точностью до 10-микрон на трехосевой платформе размером 400 mm × 400 mm × 150 mm и удерживает небольшую, быстро заменяемую сборку «иглодержателя» (рис. 2, рис. 3А).
Игла фрезерована из вольфрам-рениевой проволоки диаметром 40 мкм, и с помощью электрохимического травления ее диаметр уменьшен до 24 мкм вдоль введенной длины (рис. 2А). Кончик иглы предназначен как для зацепления петель для введения — для транспортировки и введения отдельных нитей — так и для проникновения в мозговые оболочки и ткани мозга. Игла приводится в движение линейным двигателем, обеспечивающим переменную скорость ввода и быстрое ускорение втягивания (до 30000 мм с −2), чтобы способствовать разделению зонда и иглы. Пинчер представляет собой вольфрамовую проволоку диаметром 50 мкм, согнутую на кончике и с приводом как в осевом, так и во вращательном направлении (рис. 2В). Он служит в качестве опоры для зондов во время транспортировки и в качестве направляющей, чтобы гарантировать, что нити вставляются вдоль пути иглы. На рисунке 4 показана последовательность фотографий процесса вставки нитей в агарознную симуляцию мозговой ткани.
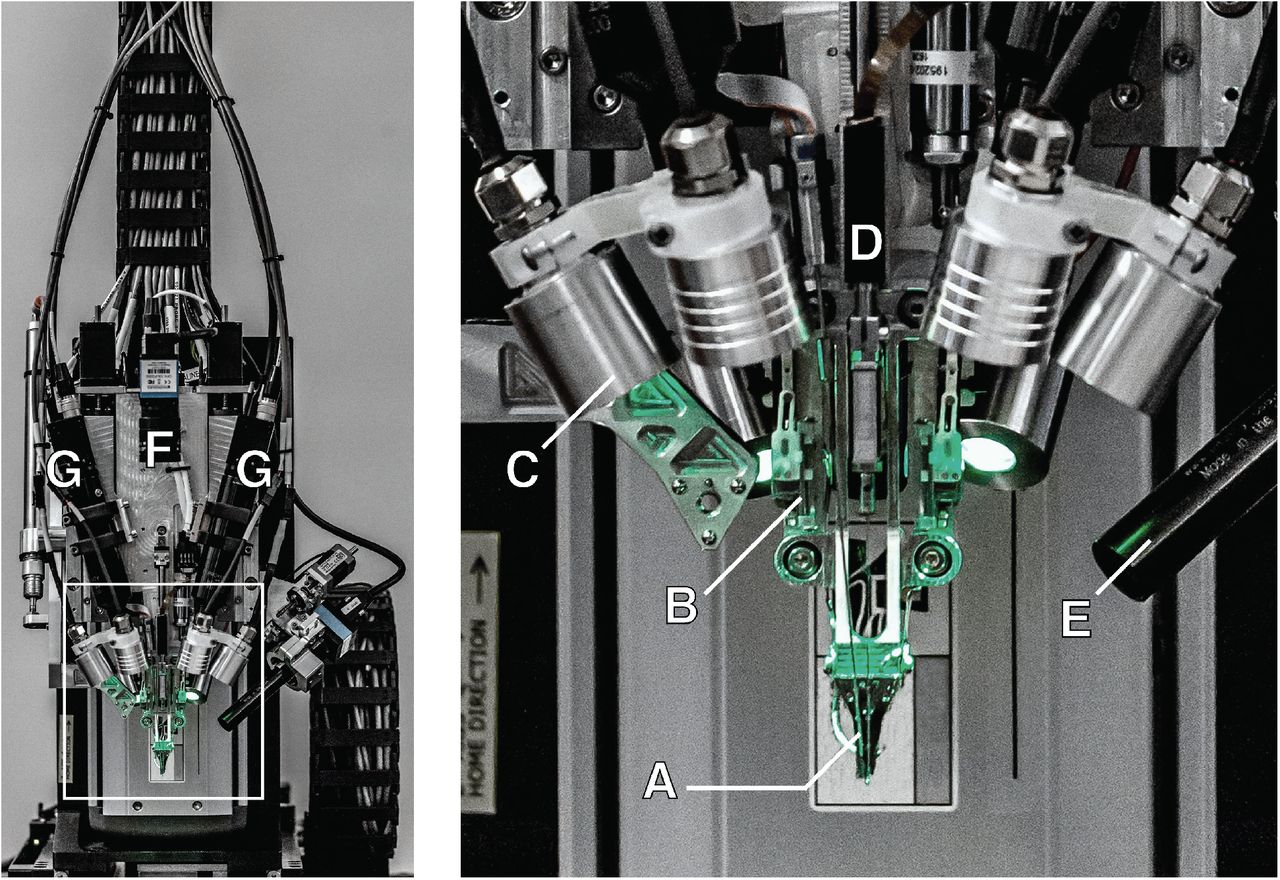
Рисунок 3: роботизированное устройство для ввода электродов; увеличенный вид головки для ввода показан на вставке. A. Загруженый иглодержатель. B. Контактный датчик положения мозга слабого воздействия. C. Световые модули с несколькими независимыми длинами волн. D. Игольчатый мотор. E. Одна из четырех камер, которая фокусируется на игле во время введения. F. Камера с широким углом обзора операционного поля. G. Стереоскопические камеры.
В головке роботизированного устройства для ввода нитей также находится стек камер для получения изображений (рис. 3E-G), используемых для направления иглы в петлю нити, нацеливания перед вводом, просмотра ввода в реальном времени и проверки. Кроме того, головка устройства содержит шесть независимых световых модулей, каждый из которых способен независимо освещать с длинной волны 405 нм, 525 нм и 650 нм или белом свете (рис. 3C). Освещение 405 нм возбуждает флуоресценцию от полиимида и позволяет оптическому стеку и компьютерному зрению надежно локализовать петлю нити (16 × 50) мкм2 и выполнять субмикронное визуальное сервоуправление, чтобы направлять, освещенную 650 нм светом иглу сквозь петлю. Стереоскопические камеры, программные монокулярные вычисления с расширенной глубиной резкости и освещение светом 525 нм позволяют точно оценить местоположение участка поверхности коры головного мозга.
Робот регистрирует места ведения в общей координатной сетке на черепе, что в сочетании с отслеживанием глубины позволяет точно нацеливаться на анатомически определенные структуры мозга. Интегрированный пользовательский пакет программного обеспечения позволяет предварительно отбирать все места вставки, позволяя планировать пути вставки, минимизировать путаницу и нагрузку на каждую нить. Одной из основных функций планирования является возможность избежать повреждения сосудистой сетки во время вставки, что является одним из ключевых преимуществ введения электродов по отдельности. Это особенно важно, поскольку считается, что повреждение гематоэнцефалического барьера играет ключевую роль в воспалительной реакции мозга на посторонние предметы [33].
Робот имеет режим автоматической вставки, который позволяет вставлять до 6 нитей (192 электрода) в минуту. Несмотря на то, что вся процедура введения может быть автоматизирована, хирург сохраняет полный контроль и при желании может выполнять ручную микрорегулировку положения нити перед каждым введением в кору. Нейрохирургический робот совместим со стерильным кожухом и обладает функциями, облегчающими успешные и быстрые иньекции, такие как автоматическая ультразвуковая стерилизация иглы. Картридж иглодержателя (NPC; рис. 2C) — это часть головки вставки, которая непосредственно контактирует с тканями головного мозга и является расходным материалом, который можно заменить во время операции менее чем за минуту.

Рисунок 4: 1. Устройство для ввода с нитью приближается к симуляции мозговой ткани. i. игла и канюля (прим.: полая игла). ii. ранее вставленная нить. 2. Вставка касается поверхности имитации ткани мозга. 3. Игла проникает в имитацию ткани, доставляя нить на заданную глубину. iii. вставка нити. 4. Устройство ввода нити отходит, оставляя нить в ткани. iv. вживленная нить.
С помощью этой системы мы продемонстрировали успешность введения в 87,1 ± 12,6% случаев (среднее ± среднеквадратичное отклонение), после 19 операций. При проведении исследования были сделаны точные ручные корректировки, чтобы избежать повреждение микроциркуляторныз русел на поверхности коры, что увеличило общее время введения от максимально быстрого. Даже с учетом этих корректировок общее время введения для данного исследования в среднем составляло ~ 45 мин., при приблизительной скорости введения 29,6 электродов в минуту (рис. 6). Введение выполняли при двусторонней краниотомии участков площадью (4 × 7) мм2 с интервалом > 300 мкм между нитями, чтобы максимизировать кортикальное покрытие. Это демонстрирует, что роботизированная вставка тонких полимерных электродов является эффективным и масштабируемым подходом для записи активности большого количества нейронов в анатомически определенных областях мозга.
4. Электроника
Постоянная запись сигнала с тысяч электродов представляет значительные проблемы с электроникой и упаковкой. Плотность каналов записи требует размещения модуля усиления и оцифровки сигнала в сборке самого устройства, в противном случае требования к кабелю и разъему будут чрезмерно высокими. Этот модуль записи должен усиливать слабые нейронные сигналы (<10 мкВРМС), в то же время подавлять внеполосный шум, дискретизировать и оцифровывать усиленные сигналы и выводить результаты для обработки в реальном времени — все с использованием как можно меньшей мощности и размера.
Электроника построена на нашей специализированной интегральной схеме (ASIC) для приложений Neuralink, которая состоит из 256 индивидуально программируемых усилителей («аналоговых пикселей»), встроенных аналого-цифровых преобразователей (АЦП) и периферийной схемы управления для сериализации оцифрованных выходных сигналов.
Аналоговый пиксель легко настраивается: коэффициенты усиления и свойства фильтра могут быть откалиброваны для учета изменений качества сигнала из-за изменчивости процесса и электрофизиологической среды. Встроенный АЦП производит дискретизацию на частоте 19,3 кГц с разрешением 10 бит. Каждый аналоговый пиксель потребляет 5,2 мкВт, а вся ASIC потребляет около 6 мВт, включая драйверы часов. Характеристики ASIC Neuralink приведены в таблице 1, а фотография изготовленного устройства показана на рис. 5A.

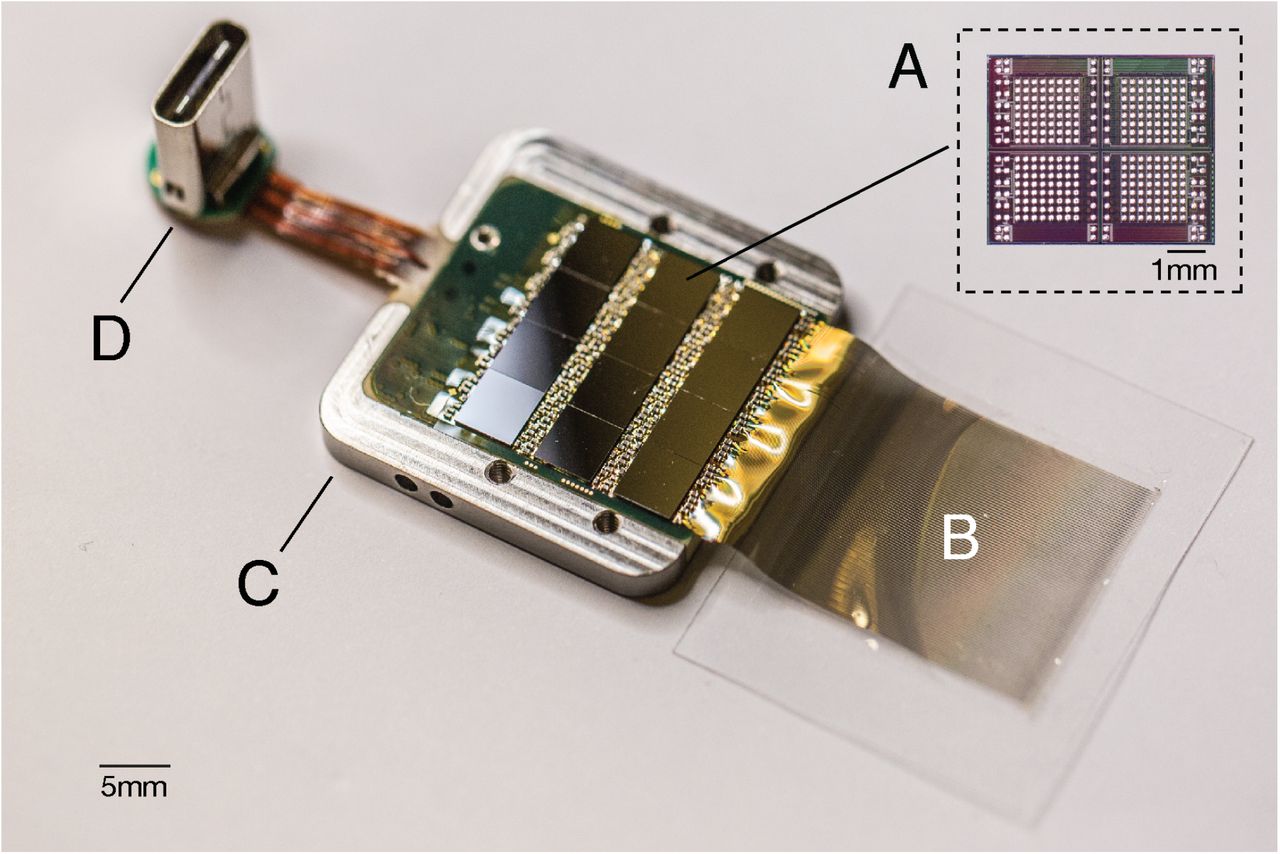
Рисунок 5: Сенсорное устройство в упаковке. А. Каждый отдельный чип в схеме ASIC способен обрабатывать 256 каналов данных. Все устройство в сборе содержит 12 таких чипов, что в общей сложности составляет 3072 канала. B. Полимерные нити на париленовой основе. C. Титановый корпус (крышка снята). D. Цифровой разъем USB-C для питания и передачи данных.
Neuralink ASIC представляет собой ядро модульной платформы записи, которая позволяет легко заменять составные части для целей исследований и разработок (рис. 5). В системах, обсуждаемых здесь, несколько ASIC интегрированы в стандартную печатную плату (PCB), используя метод соединения flip-chip. Каждая система состоит из программируемой пользователем вентильная матрица (прим. FPGA ); датчиков температуры, акселерометра, магнитометра в реальном времени и одного разъема USB-C для передачи данных с полной пропускной способностью. Системы упакованы в титановые корпуса, которые покрыты париленом-c, который служит влагобарьером для предотвращения проникновения жидкости и продления срока службы.
Мы описали созданные конфигурации: систему записи на 1536 каналов («Система A») и систему записи на 3072 каналов («Система B»), в таблице 2. В то время как Система A использует ASIC Neuralink текущего поколения, Система B использует более раннюю версию с сопоставимой функциональностью, но с более низкими характеристиками производительности. Система B была разработана, чтобы максимизировать плотность каналов и используется для приложений, которые требуют чрезвычайно большого количества каналов. Система A, напротив, была разработана для обеспечения более быстрой и надежной установки; она может быть установлена в пять раз быстрее, чем система B обладающая большей результативностью.
Базовая станция, подключенная к локальной сети Ethernet, преобразует потоки данных из этих систем в многоадресные UDP-пакеты 10G Ethernet, позволяющие последующим пользователям обрабатывать данные различными способами, например, визуализация данных в режиме реального времени [34] или запись их на диск. Каждая базовая станция может подключать до трех имплантатов одновременно. Устройства дополнительно поддерживаются программной экосистемой, которая обеспечивает удобство использования по принципу «plug and play» с нулевой конфигурацией: поток передачи данных активируется автоматически при подключении кабеля.
5. Электрофизиология
Мы имплантировали обе системы A и B самцам крыс породы Long-Evans, как описано в разделе 3. Все процедуры на животных выполнялись в соответствии с Руководством Национального исследовательского совета по уходу и использованию лабораторных животных и были одобрены комитетом по уходу и использованию животных Neuralink. Электрофизиологические записи были сделаны, когда животные свободно исследовали арену, оснащенную кабелем, который позволял неограниченное передвижение. Система A может записывать 1344 из 1536 каналов одновременно, точная конфигурация канала может быть произвольно указана во время записи; Система B может записывать со всех 3072 каналов одновременно. Оцифрованные широкополосные сигналы обрабатывались в режиме реального времени для определения потенциалов действия нейронов (пиков) с помощью онлайн-алгоритма обнаружения.

Рисунок 6: Имплантация нитей и сборка. А. Пример оперативного изображения, показывающего поверхность коры с имплантированными нитями и минимальным кровотечением. B. Сенсорное устройство в сборе («Система B»), постоянно имплантированное крысе.
Требования к обнаружению пиков для НКИ в реальном времени отличаются от большинства традиционных нейрофизиологических исследований. В то время как большинство электрофизиологов отбирают данные в автономном режиме и тратят значительные усилия на то, чтобы отклонить ложноположительные события пиков, события НКИ должны обнаруживаться в режиме реального времени, а параметры обнаружения пиков должны максимизировать эффективность декодирования. Используя наше специальное онлайн-программное обеспечение для детектирования пиков, мы обнаружили, что разрешающий фильтр, который допускает оценку ложных срабатываний ± 0,2 Гц, работает лучше, чем установка строгих порогов, которые могут отклонять реальные пики (данные не показаны).
Учитывая эти соображения, мы установили порог на уровне > 0,35 Гц для определения количества электродов, которые регистрировали пики. Так как мы обычно не сортируем данные по пикам, мы не сообщаем о нескольких единицах на канал. BMI-декодеры обычно работают без сортировки с минимальными потерями производительности [36, 37]. Более того, последние результаты показывают, что сортировка пиков не является необходимой для точной оценки динамики нейронной популяции [38].
Данные недавнего эксперимента с использованием системы A показаны на рис. 7 и рис. 8. В этом эксперименте 40 из 44 попыток введения были успешными (90%) для в общей сложности 1280 имплантированных электродов, из которых 1020 записывались одновременно. Широкополосные сигналы, записанные из представленных нитей, показывают как локальные потенциалы так и пиковую активность рис.7. Пример выходных данных системы обнаружения пиков показан в виде растра на рис. 8. В этом примере две перекрывающиеся конфигурации записи были использованы для записи со всех 1280 имплантированных каналов. На этом массиве наш выход на пики составлял 53,4% каналов, причем многие пики появлялись на нескольких соседних каналах, как это наблюдалось в других опытах с высокой плотностью электродов [16, 17, 21]. На других массивах системы A мы получали результат в 59,10 ± 5,74% (среднее ± стандартная ошибка среднего) в 19 операциях с максимальным показателем 85,5%.

Рисунок 7: Слева: широкополосные нейронные сигналы (нефильтрованные), одновременно полученные из одной нити (32 канала), имплантированной в кору головного мозга крысы. Каждый канал (ряд) соответствует участку электрода на нити (схема слева; участки разнесены на 50 мкм). Пики и локальные потенциалы поля очевидны. Справа: предполагаемые осциллограммы (несортированные); числа указывают местоположение канала в потоке. Средняя форма сигнала показана черным.
6. Обсуждение
Мы описали НКИ с высоким числом каналов и разрешением одного пика. Он основан на гибких полимерных датчиках, роботизированной системе ввода и специальной электронике с низким энергопотреблением. Эта система служит двум основным целям: это исследовательская платформа для использования на грызунах и служит прототипом для будущих человеческих клинических имплантатов. Возможность быстрой итерации конструкций и испытаний на грызунах позволяет быстро усовершенствовать устройства, производственные процессы и программное обеспечение. Поскольку это исследовательская платформа, система использует проводное соединение, чтобы максимизировать пропускную способность для потоковой передачи необработанных данных. Это важно для оценки производительности и имеет решающее значение для разработки алгоритмов обработки и декодирования сигналов. В отличие от этого, клинические устройства, которые будут производиться на этой платформе, будут полностью имплантируемыми, что потребует герметичной упаковки, и будут иметь встроенное сжатие сигнала, пониженное энергопотребление, беспроводную передачу энергии и телеметрию данных через кожу без использования проводов.

Рисунок 8: Наши устройства позволяют регистрировать широко распространенную нейронную активность, распределенную по нескольким областям мозга и кортикальным слоям. Слева: места введения нити (цветные кружки) указаны на изображении мозга грызунов. [35] Справа: растр из 1020 одновременно записанных каналов, отсортированных по потокам (цвет соответствует месту вставки). Врезка: увеличенное изображение пиков из одной нити. Эта нить соответствует той, которая показана на рис. 7.
Модуляция нейронной активности будет важной частью клинических интерфейсов мозг-машина следующего поколения [39], например, чтобы обеспечить чувство осязания или проприоцепции для управления нейропротезными движениями [40, 41]. Поэтому мы разработали ASIC Neuralink, способную к электростимуляции на каждом канале, хотя мы не продемонстрировали эти возможности здесь.
Эта система НКИ имеет несколько преимуществ по сравнению с предыдущими подходами. Размер и состав тонкопленочных зондов лучше соответствуют свойствам материала мозговой ткани, чем обычно используемые кремниевые зонды, и поэтому могут демонстрировать повышенную биосовместимость [28, 21]. Кроме того, возможность выбирать, куда вставлять наши зонды, в том числе в подкорковые структуры, позволяет нам создавать собственные геометрии массивов для нацеливания на определенные области мозга, не повреждая при этом сосудистые сети. Эта особенность важна для создания высокопроизводительного НКИ, поскольку распределение электродов может быть настроено в зависимости от требований задачи. Наконец, миниатюризация и дизайн Neuralink ASIC обеспечивают большую гибкость в проектировании системы и поддерживают очень высокое число каналов в пределах практичного размера и небольшой потребляемой мощности.
В принципе, наш подход к интерфейсам мозг-машина является расширяемым и масштабируемый. Здесь мы сообщаем об одновременной широкополосной записи от более чем 3000 вставленных электродов у свободно движущейся крысы. В более крупном мозгу можно легко имплантировать несколько устройств с этой архитектурой, и поэтому мы могли бы взаимодействовать с намного большим количеством нейронов без серьезного реинжиниринга. Дальнейшее развитие хирургической робототехники может позволить нам достичь этого так же и без значительного увеличения времени операции.
До того, как устройство с высокой пропускной способностью станет пригодным для клинического применения, необходимо будет решить ряд серьезных технологических проблем, но уже сейчас нетрудно представить, что подобное устройством позволит пациентам с повреждением спинного мозга ловко управлять цифровой мышью и клавиатурой. А в сочетании с быстро совершенствующимися методами стимуляции спинного мозга [42], в будущем этот подход мог бы восстановить моторную функцию. Нейронные интерфейсы с высокой пропускной способностью должны обеспечивать множество новых терапевтических возможностей.
7. Благодарности
Мы хотели бы поблагодарить Ливерморскую национальную лабораторию им. Лоуренса (LLNL), Лабораторию нанотехнологий Беркли Марвелл, Центр беспроводных исследований Беркли (BWRC), Стэнфордский центр нанотехнологий, а также бывших и нынешних сотрудников Neuralink за их вклад в работу, описанную здесь.
8. Дополнительные видео
Видео 1: серия из шести вставок нейрохирургического робота в агарозную имитацию мозговой ткани. Захват резьбы иглой происходит вне кадра. Изменения цвета фона вызваны освещением разными частотами света на разных этапах процесса заправки и вставки. Одна нить была вставлена перед началом видео. ( www.biorxiv.org/content/biorxiv/early/2019/07/18/703801/DC1/embed/media-1.mp4?download=true)
Видео 2: Трехмерная визуализация процесса имплантации нитей (те же данные, что и на рис. 8). Вставка нити визуализируется в том же порядке, что и в реальной операции, но в режиме ускоренного воспроизведения. Размер нити и глубина вставки являются типичными. Стереотаксические координаты каждой вставки представлены в наборе данных, предоставленном Calabrese и сотрудниками [35]. ( www.biorxiv.org/content/biorxiv/early/2019/07/18/703801/DC2/embed/media-2.mp4?download=true)
9. Источники
[1] Leigh R. Hochberg et al. “Neuronal ensemble control of prosthetic devices by a human with tetraplegia”. In: Nature 442 (2006), p. 164. issn: 1476-4687.
[2] Wei Wang et al. “An Electrocorticographic Brain Interface in an Individual with Tetraplegia”. In: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. “Decoding motor imagery from the posterior parietal cortex of a tetraplegic human”. In: Science 348 (2015), pp. 906–910. issn: 0036-8075.
[4] Leigh R. Hochberg et al. “Reach and grasp by people with tetraplegia using a neurally controlled robotic arm”. In: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L Collinger et al. “High-performance neuroprosthetic control by an individual with tetraplegia”. In: The Lancet 381 (2013), pp. 557–564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier, and Edward F. Chang. “Speech synthesis from neural decoding of spoken sentences”. In: Nature 568 (2019), pp. 493–498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou, and Christof Koch. “The origin of extracellular fields and currents — EEG, ECoG, LFP and spikes”. In: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. “Investigating large-scale brain dynamics using field potential recordings: analysis and interpretation”. In: Nature Neuroscience 21 (2018), pp. 903–919. issn: 1097-6256.
[9] Taro Kaiju et al. “High Spatiotemporal Resolution ECoG Recording of Somatosensory Evoked Potentials with Flexible Micro-Electrode Arrays”. In: Frontiers in Neural Circuits 11 (2017), p. 20.
[10] Rafael Yuste. “From the neuron doctrine to neural networks”. In: Nature Reviews Neuroscience 16 (2015), pp. 487– 497. issn: 1471-003x.
[11] Guosong Hong and Charles M Lieber. “Novel electrode technologies for neural recordings”. In: Nature Reviews Neuroscience (2019), pp. 1–16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen, and Richard A. Normann. “The Utah Intracortical Electrode Array: A recording structure for potential brain-computer interfaces”. In: Electroencephalography and Clinical Neurophysiology 102.3 (1997), pp. 228–239. issn: 0013-4694.
[13] Miguel A. L. Nicolelis et al. “Chronic, multisite, multielectrode recordings in macaque monkeys”. In: Proceedings of the National Academy of Sciences 100.19 (2003), pp. 11041–11046. issn: 0027-8424. eprint: www. pnas.org/content/100/19/11041.full.pdf.
[14] K. D. Wise et al. “Microelectrodes, Microelectronics, and Implantable Neural Microsystems”. In: Proceedings of the IEEE 96.7 (2008), pp. 1184–1202. issn: 0018-9219.
[15] Nicholas M. Dotson et al. “A Large-Scale Semi-Chronic Microdrive Recording System for Non-Human Primates”. In: Neuron 96 (2017), 769–782.e2. issn: 0896-6273.
[16] James J. Jun et al. “Fully integrated silicon probes for high-density recording of neural activity”. In: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi et al. “SiNAPS: an implantable Active Pixel Sensor CMOS-probe for Simultaneous largescale Neural recordings”. In: Biosensors and Bioelectronics 126 (2018), pp. 355–364. issn: 0956-5663.
[18] Felix Deku et al. “Amorphous silicon carbide ultramicroelectrode arrays for neural stimulation and recording”. In: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps, and Christian Bergaud. “A review on mechanical considerations for chronically-implanted neural probes”. In: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. “NeuroGrid: recording action potentials from the surface of the brain”. In: Nature Neuroscience 18 (2014), pp. 310–315. issn: 1097-6256.
[21] Jason E. Chung et al. “High-Density, Long-Lasting, and Multi-region Electrophysiological Recordings Using Polymer Electrode Arrays”. In: Neuron 101 (2019), 21–31.e5. issn: 0896-6273.
[22] Stephan L. Chorover and Anne-Marie Deluca. “A sweet new multiple electrode for chronic single unit recording in moving animals”. In: Physiology & Behavior 9 (1972), pp. 671–674. issn: 0031-9384.
[23] Jia Liu et al. “Syringe-injectable electronics”. In: Nature Nanotechnology 10 (2015), pp. 629–636. issn: 1748-3387.
[24] Tian-Ming Fu et al. “Stable long-term chronic brain mapping at the single-neuron level”. In: Nature Methods 13 (2016), pp. 875–882. issn: 1548-7091.
[25] Flavia Vitale et al. “Fluidic Microactuation of Flexible Electrodes for Neural Recording”. In: Nano Letters 18.1 (2018), pp. 326–335. eprint: doi.org/10.1021/acs.nanolett.7b04184.
[26] Lan Luan et al. “Ultraflexible nanoelectronic probes form reliable, glial scar–free neural integration”. In: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro et al. “NeuroRoots, a bio-inspired, seamless Brain Machine Interface device for long-term recording.” In: bioRxiv (2018), p. 460949.
[28] Timothy L Hanson et al. “The “sewing machine” for minimally invasive neural recording”. In: bioRxiv (2019). eprint: www.biorxiv.org/content/early/2019/03/14/578542.full.pdf.
[29] Kip A Ludwig et al. “Chronic neural recordings using silicon microelectrode arrays electrochemically deposited with a poly(3,4-ethylenedioxythiophene) (PEDOT) film”. In: Journal of Neural Engineering 3 (2006), p. 59. issn: 1741-2552.
[30] Seth J. Wilks et al. “Poly(3,4-ethylenedioxythiophene) as a Micro-Neural Interface Material for Electrostimulation”. In: Frontiers in Neuroengineering 2 (2009), p. 7. issn: 1662-6443.
[31] J D Klein, S L Clauson, and S F Cogan. “Morphology and charge capacity of sputtered iridium oxide films”. In: Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films 7 (1989), pp. 3043–3047. issn: 0734- 2101.
[32] S.F. Cogan, T. D. Plante, and J. Ehrlich. “Sputtered Iridium Oxide Films (SIROFs) for Low-Impedance Neural Stimulation and Recording Electrodes”. In: The 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society 2 (2004), pp. 4153–4156.
[33] Tarun Saxena et al. “The impact of chronic blood–brain barrier breach on intracortical electrode function”. In: Biomaterials 34 (2013), pp. 4703–4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. “Open Ephys: an open-source, plugin-based platform for multichannel electrophysiology”. In: J. Neural Eng. 14 (2017), pp. 1–13.
[35] E. Calabrese et al. “A quantitative magnetic resonance histology atlas of postnatal rat brain development with regional estimates of growth and variability”. In: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova et al. “To sort or not to sort: the impact of spike-sorting on neural decoding performance”. In: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P Christie et al. “Comparison of spike sorting and thresholding of voltage waveforms for intracortical brain–machine interface performance”. In: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. “Accurate Estimation of Neural Population Dynamics without Spike Sorting”. In: Neuron (2019). issn: 0896-6273.
[39] Andy Zhou et al. “A wireless and artefact-free 128-channel neuromodulation device for closed-loop stimulation and recording in non-human primates”. In: Nature Biomedical Engineering 3 (2019), pp. 15–26.
[40] Joseph E O’Doherty et al. “Active tactile exploration using a brain-machine-brain interface”. In: Nature 479 (2011). issn: 1476-4687.
[41] Sharlene N Flesher et al. “Restored tactile sensation improves neuroprosthetic arm control”. In: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner et al. “Targeted neurotechnology restores walking in humans with spinal cord injury”. In: Nature 563 (2018), pp. 65–71. issn: 0028-0836.
[2] Wei Wang et al. “An Electrocorticographic Brain Interface in an Individual with Tetraplegia”. In: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. “Decoding motor imagery from the posterior parietal cortex of a tetraplegic human”. In: Science 348 (2015), pp. 906–910. issn: 0036-8075.
[4] Leigh R. Hochberg et al. “Reach and grasp by people with tetraplegia using a neurally controlled robotic arm”. In: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L Collinger et al. “High-performance neuroprosthetic control by an individual with tetraplegia”. In: The Lancet 381 (2013), pp. 557–564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier, and Edward F. Chang. “Speech synthesis from neural decoding of spoken sentences”. In: Nature 568 (2019), pp. 493–498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou, and Christof Koch. “The origin of extracellular fields and currents — EEG, ECoG, LFP and spikes”. In: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. “Investigating large-scale brain dynamics using field potential recordings: analysis and interpretation”. In: Nature Neuroscience 21 (2018), pp. 903–919. issn: 1097-6256.
[9] Taro Kaiju et al. “High Spatiotemporal Resolution ECoG Recording of Somatosensory Evoked Potentials with Flexible Micro-Electrode Arrays”. In: Frontiers in Neural Circuits 11 (2017), p. 20.
[10] Rafael Yuste. “From the neuron doctrine to neural networks”. In: Nature Reviews Neuroscience 16 (2015), pp. 487– 497. issn: 1471-003x.
[11] Guosong Hong and Charles M Lieber. “Novel electrode technologies for neural recordings”. In: Nature Reviews Neuroscience (2019), pp. 1–16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen, and Richard A. Normann. “The Utah Intracortical Electrode Array: A recording structure for potential brain-computer interfaces”. In: Electroencephalography and Clinical Neurophysiology 102.3 (1997), pp. 228–239. issn: 0013-4694.
[13] Miguel A. L. Nicolelis et al. “Chronic, multisite, multielectrode recordings in macaque monkeys”. In: Proceedings of the National Academy of Sciences 100.19 (2003), pp. 11041–11046. issn: 0027-8424. eprint: www. pnas.org/content/100/19/11041.full.pdf.
[14] K. D. Wise et al. “Microelectrodes, Microelectronics, and Implantable Neural Microsystems”. In: Proceedings of the IEEE 96.7 (2008), pp. 1184–1202. issn: 0018-9219.
[15] Nicholas M. Dotson et al. “A Large-Scale Semi-Chronic Microdrive Recording System for Non-Human Primates”. In: Neuron 96 (2017), 769–782.e2. issn: 0896-6273.
[16] James J. Jun et al. “Fully integrated silicon probes for high-density recording of neural activity”. In: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi et al. “SiNAPS: an implantable Active Pixel Sensor CMOS-probe for Simultaneous largescale Neural recordings”. In: Biosensors and Bioelectronics 126 (2018), pp. 355–364. issn: 0956-5663.
[18] Felix Deku et al. “Amorphous silicon carbide ultramicroelectrode arrays for neural stimulation and recording”. In: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps, and Christian Bergaud. “A review on mechanical considerations for chronically-implanted neural probes”. In: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. “NeuroGrid: recording action potentials from the surface of the brain”. In: Nature Neuroscience 18 (2014), pp. 310–315. issn: 1097-6256.
[21] Jason E. Chung et al. “High-Density, Long-Lasting, and Multi-region Electrophysiological Recordings Using Polymer Electrode Arrays”. In: Neuron 101 (2019), 21–31.e5. issn: 0896-6273.
[22] Stephan L. Chorover and Anne-Marie Deluca. “A sweet new multiple electrode for chronic single unit recording in moving animals”. In: Physiology & Behavior 9 (1972), pp. 671–674. issn: 0031-9384.
[23] Jia Liu et al. “Syringe-injectable electronics”. In: Nature Nanotechnology 10 (2015), pp. 629–636. issn: 1748-3387.
[24] Tian-Ming Fu et al. “Stable long-term chronic brain mapping at the single-neuron level”. In: Nature Methods 13 (2016), pp. 875–882. issn: 1548-7091.
[25] Flavia Vitale et al. “Fluidic Microactuation of Flexible Electrodes for Neural Recording”. In: Nano Letters 18.1 (2018), pp. 326–335. eprint: doi.org/10.1021/acs.nanolett.7b04184.
[26] Lan Luan et al. “Ultraflexible nanoelectronic probes form reliable, glial scar–free neural integration”. In: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro et al. “NeuroRoots, a bio-inspired, seamless Brain Machine Interface device for long-term recording.” In: bioRxiv (2018), p. 460949.
[28] Timothy L Hanson et al. “The “sewing machine” for minimally invasive neural recording”. In: bioRxiv (2019). eprint: www.biorxiv.org/content/early/2019/03/14/578542.full.pdf.
[29] Kip A Ludwig et al. “Chronic neural recordings using silicon microelectrode arrays electrochemically deposited with a poly(3,4-ethylenedioxythiophene) (PEDOT) film”. In: Journal of Neural Engineering 3 (2006), p. 59. issn: 1741-2552.
[30] Seth J. Wilks et al. “Poly(3,4-ethylenedioxythiophene) as a Micro-Neural Interface Material for Electrostimulation”. In: Frontiers in Neuroengineering 2 (2009), p. 7. issn: 1662-6443.
[31] J D Klein, S L Clauson, and S F Cogan. “Morphology and charge capacity of sputtered iridium oxide films”. In: Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films 7 (1989), pp. 3043–3047. issn: 0734- 2101.
[32] S.F. Cogan, T. D. Plante, and J. Ehrlich. “Sputtered Iridium Oxide Films (SIROFs) for Low-Impedance Neural Stimulation and Recording Electrodes”. In: The 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society 2 (2004), pp. 4153–4156.
[33] Tarun Saxena et al. “The impact of chronic blood–brain barrier breach on intracortical electrode function”. In: Biomaterials 34 (2013), pp. 4703–4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. “Open Ephys: an open-source, plugin-based platform for multichannel electrophysiology”. In: J. Neural Eng. 14 (2017), pp. 1–13.
[35] E. Calabrese et al. “A quantitative magnetic resonance histology atlas of postnatal rat brain development with regional estimates of growth and variability”. In: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova et al. “To sort or not to sort: the impact of spike-sorting on neural decoding performance”. In: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P Christie et al. “Comparison of spike sorting and thresholding of voltage waveforms for intracortical brain–machine interface performance”. In: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. “Accurate Estimation of Neural Population Dynamics without Spike Sorting”. In: Neuron (2019). issn: 0896-6273.
[39] Andy Zhou et al. “A wireless and artefact-free 128-channel neuromodulation device for closed-loop stimulation and recording in non-human primates”. In: Nature Biomedical Engineering 3 (2019), pp. 15–26.
[40] Joseph E O’Doherty et al. “Active tactile exploration using a brain-machine-brain interface”. In: Nature 479 (2011). issn: 1476-4687.
[41] Sharlene N Flesher et al. “Restored tactile sensation improves neuroprosthetic arm control”. In: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner et al. “Targeted neurotechnology restores walking in humans with spinal cord injury”. In: Nature 563 (2018), pp. 65–71. issn: 0028-0836.



