

До появления YOLO большинство способов обнаружения объектов пытались адаптировать классификаторы для детекции. В YOLO же, обнаружение объектов было сформулировано как задача регрессии на пространственно разделенных ограничивающих рамок (bounding boxes) и связанных с ними вероятностей классов.
В данной статье мы узнаем о системе YOLO Object Detection и как реализовать подобную систему в Tensorflow 2.0
О YOLO:
Наша унифицированная архитектура чрезвычайно быстра. Базовая модель YOLO обрабатывает изображения в режиме реального времени со скоростью 45 кадров в секунду. Уменьшенная версия сети, Fast YOLO, обрабатывает аж 155 кадра в секунду…
— You Only Look Once: Unified, Real-Time Object Detection, 2015
Что такое YOLO?

YOLO – это новейшая (на момент написания оригинальной статьи) система (сеть) обнаружения объектов. Она была разработана Джозефом Редмоном (Joseph Redmon). Наибольшим преимуществом YOLO над другими архитектурами является скорость. Модели семейства YOLO исключительно быстры и намного превосходят R-CNN (Region-Based Convolutional Neural Network) и другие модели. Это позволяет добиться обнаружения объектов в режиме реального времени.
На момент первой публикации (в 2016 году) по сравнению с другими системами, такими как R-CNN и DPM (Deformable Part Model), YOLO добилась передового значения mAP (mean Average Precision). С другой стороны, YOLO испытывает трудности с точной локализацией объектов. Однако в новой версии были внесены улучшения в скорости и точности системы.
Альтернативы (на момент публикации статьи): Другие архитектуры в основном использовали метод скользящего окна по всему изображению, и классификатор использовался для определенной области изображения (DPM). Также, R-CNN использовал метод предложения регионов (region proposal method). Описываемый метод сначала создает потенциальные bounding box’ы. Затем, на области, ограниченные bounding box’ами, запускается классификатор и следующее удаление повторяющихся распознаваний, и уточнение границ рамок.
YOLO переосмыслила задачу обнаружения объектов в задачу регрессии. Она идет от пикселей изображения к координатам bounding box’ов и вероятностей классов. Тем самым, единая сверточная сеть предсказывает несколько bounding box’ов и вероятности классов для содержания этих областей.
Теория
Так как YOLO необходимо только один взгляд на изображение, то метод скользящего окна не подходит в данной ситуации. Вместо этого, изображение будет поделено на сетку с ячейками размером S x S. Каждая ячейка может содержать несколько разных объектов для распознавания.
Во-первых, каждая ячейка отвечает за прогнозирование количества bounding box’ов. Также, каждая ячейка прогнозирует доверительное значение (confidence value) для каждой области, ограниченной bounding box’ом. Иными словами, это значение определяет вероятность нахождения того или иного объекта в данной области. То есть в случае, если какая-то ячейка сетки не имеет определенного объекта, важно, чтобы доверительное значение для этой области было низким.
Когда мы визуализируем все предсказания, мы получаем карту объектов и упорядоченных по доверительному значению, рамки.

Во-вторых, каждая ячейка отвечает за предсказание вероятностей классов. Это не говорит о том, что какая-то ячейка содержит какой-то объект, только вероятность нахождения объекта. Допустим, если ячейка предсказывает автомобиль, это не гарантирует, что автомобиль в действительности присутствует в ней. Это говорит лишь о том, что если присутствует объект, то этот объект скорее всего автомобиль.
Давайте подробней опишем вывод модели.
В YOLO используются anchor boxes (якорные рамки / фиксированные рамки) для прогнозирования bounding box’ов. Идея anchor box’ов сводится к предварительному определению двух различных форм. И таким образом, мы можем объединить два предсказания с двумя anchor box’ами (в целом, мы могли бы использовать даже большее количество anchor box’ов). Эти якоря были рассчитаны с помощью датасета COCO (Common Objects in Context) и кластеризации k-средних (K-means clustering).

У нас есть сетка, где каждая ячейка предсказывает:
Для каждого bounding box'а:
4 координаты (tx , ty , tw , th)
1 objectness error (ошибка объектности), которая является показателем уверенности в присутствии того или иного объекта
Некоторое количество вероятностей классов
Если же присутствует некоторое смещение от верхнего левого угла на cx , cy то прогнозы будут соответствовать:

где pw (ширина) и ph (высота) соответствуют ширине и высоте bounding box'а. Вместо того, чтобы предугадывать смещение как в прошлой версии YOLOv2, авторы прогнозируют координаты местоположения относительно местоположения ячейки.
Этот вывод является выводом нашей нейронной сети. В общей сложности здесьS x S x [B * (4+1+C)] выводов, где B – это количество bounding box'ов, которое может предсказать ячейка на карте объектов, C – это количество классов, 4 – для bounding box'ов, 1 – для objectness prediction (прогнозирование объектности). За один проход мы можем пройти от входного изображения к выходному тензору, который соответствует обнаруженным объектам на картинке. Также стоит отметить, что YOLOv3 прогнозирует bounding box'ы в трех разных масштабах.
Теперь, если мы возьмем вероятность и умножим их на доверительные значения, мы получим все bounding box'ы, взвешенные по вероятности содержания этого объекта.
Простое нахождение порогового значения избавит нас от прогнозов с низким доверительным значением. Для следующего шага важно определить метрику IoU (Intersection over Union / Пересечение над объединением). Эта метрика равняется соотношению площади пересекающихся областей к площади областей объединенных.

После этого все равно могут остаться дубликаты, и чтобы от них избавиться нужно использовать “подавление не-максимумов” (non-maximum suppression). Подавление не-максимумов заключается в следующем: алгоритм берёт bounding box с наибольшей вероятностью принадлежности к объекту, затем, среди остальных граничащих bounding box'ов с данной области, возьмёт один с наивысшим IoU и подавляет его.
Ввиду того, что все делается за один прогон, эта модель будет работать почти также быстро, как и классификация. К тому же все обнаружения предсказываются одновременно, что означает, что модель неявно учитывает глобальный контекст. Проще говоря, модель может узнать какие объекты обычно встречаться вместе, их относительный размер и расположение объектов и так далее.

Мы также рекомендуем прочитать следующие статьи о YOLO:
You Only Look Once: Unified, Real-Time Object Detection
YOLO9000: Better, Faster, Stronger
YOLOv3: An Incremental Improvement
Реализация в Tensorflow
Первым шагом в реализации YOLO это подготовка ноутбука и импортирование необходимых библиотек. Целиком ноутбук с кодом вы можете на Github или Kaggle:
Следуя этой статье, мы сделаем полную сверточную сеть (fully convolutional network / FCN) без обучения. Для того, чтобы применить эту сеть для определения объектов, нам необходимо скачать готовые веса от предварительно обученной модели. Эти веса были получены от обучения YOLOv3 на датасете COCO (Common Objects in Context). Файл с весами можно скачать по ссылке официального сайта.
# Создаем папку для checkpoint'ов с весами.
# !mkdir checkpoints
# Скачиваем файл с весами для YOLOv3 с официального сайта.
# !wget https://pjreddie.com/media/files/yolov3.weights
# Импортируем необходимые библиотеки.
import cv2
import numpy as np
import tensorflow as tf
from absl import logging
from itertools import repeat
from PIL import Image
from tensorflow.keras import Model
from tensorflow.keras.layers import Add, Concatenate, Lambda
from tensorflow.keras.layers import Conv2D, Input, LeakyReLU
from tensorflow.keras.layers import MaxPool2D, UpSampling2D, ZeroPadding2D
from tensorflow.keras.regularizers import l2
from tensorflow.keras.losses import binary_crossentropy
from tensorflow.keras.losses import sparse_categorical_crossentropy
yolo_iou_threshold = 0.6 # Intersection Over Union (iou) threshold.
yolo_score_threshold = 0.6 # Score threshold.
weightyolov3 = 'yolov3.weights' # Путь до файла с весами.
size = 416 # Размер изображения.
checkpoints = 'checkpoints/yolov3.tf' # Путь до файла с checkpoint'ом.
num_classes = 80 # Количество классов в модели.
# Список слоев в YOLOv3 Fully Convolutional Network (FCN).
YOLO_V3_LAYERS = [
'yolo_darknet',
'yolo_conv_0',
'yolo_output_0',
'yolo_conv_1',
'yolo_output_1',
'yolo_conv_2',
'yolo_output_2'
]По причине того, что порядок слоев в Darknet (open source NN framework) и tf.keras разные, то загрузить веса с помощью чистого функционального API будет проблематично. В этом случае, наилучшим решением будет создание подмоделей в keras. TF Checkpoints рекомендованы для сохранения вложенных подмоделей и они официально поддерживаются Tensorflow.
# Функция для загрузки весов обученной модели.
def load_darknet_weights(model, weights_file):
wf = open(weights_file, 'rb')
major, minor, revision, seen, _ = np.fromfile(wf, dtype=np.int32, count=5)
layers = YOLO_V3_LAYERS
for layer_name in layers:
sub_model = model.get_layer(layer_name)
for i, layer in enumerate(sub_model.layers):
if not layer.name.startswith('conv2d'):
continue
batch_norm = None
if i + 1 < len(sub_model.layers) and \
sub_model.layers[i + 1].name.startswith('batch_norm'):
batch_norm = sub_model.layers[i + 1]
logging.info("{}/{} {}".format(
sub_model.name, layer.name, 'bn' if batch_norm else 'bias'))
filters = layer.filters
size = layer.kernel_size[0]
in_dim = layer.input_shape[-1]
if batch_norm is None:
conv_bias = np.fromfile(wf, dtype=np.float32, count=filters)
else:
bn_weights = np.fromfile(wf, dtype=np.float32, count=4*filters)
bn_weights = bn_weights.reshape((4, filters))[[1, 0, 2, 3]]
conv_shape = (filters, in_dim, size, size)
conv_weights = np.fromfile(wf, dtype=np.float32, count=np.product(conv_shape))
conv_weights = conv_weights.reshape(conv_shape).transpose([2, 3, 1, 0])
if batch_norm is None:
layer.set_weights([conv_weights, conv_bias])
else:
layer.set_weights([conv_weights])
batch_norm.set_weights(bn_weights)
assert len(wf.read()) == 0, 'failed to read weights'
wf.close()На этом же этапе, мы должны определить функцию для расчета IoU. Мы используем batch normalization (пакетная нормализация) для нормализации результатов, чтобы ускорить обучение. Так как tf.keras.layers.BatchNormalization работает не очень хорошо для трансферного обучения (transfer learning), то мы используем другой подход.
# Функция для расчета IoU.
def interval_overlap(interval_1, interval_2):
x1, x2 = interval_1
x3, x4 = interval_2
if x3 < x1:
return 0 if x4 < x1 else (min(x2,x4) - x1)
else:
return 0 if x2 < x3 else (min(x2,x4) - x3)
def intersectionOverUnion(box1, box2):
intersect_w = interval_overlap([box1.xmin, box1.xmax], [box2.xmin, box2.xmax])
intersect_h = interval_overlap([box1.ymin, box1.ymax], [box2.ymin, box2.ymax])
intersect_area = intersect_w * intersect_h
w1, h1 = box1.xmax-box1.xmin, box1.ymax-box1.ymin
w2, h2 = box2.xmax-box2.xmin, box2.ymax-box2.ymin
union_area = w1*h1 + w2*h2 - intersect_area
return float(intersect_area) / union_area
class BatchNormalization(tf.keras.layers.BatchNormalization):
def call(self, x, training=False):
if training is None: training = tf.constant(False)
training = tf.logical_and(training, self.trainable)
return super().call(x, training)
# Определяем 3 anchor box'а для каждой ячейки.
yolo_anchors = np.array([(10, 13), (16, 30), (33, 23), (30, 61), (62, 45),
(59, 119), (116, 90), (156, 198), (373, 326)], np.float32) / 416
yolo_anchor_masks = np.array([[6, 7, 8], [3, 4, 5], [0, 1, 2]])В каждом масштабе мы определяем 3 anchor box'а для каждой ячейки. В нашем случае если маска будет:
0, 1, 2 – означает, что будут использованы первые три якорные рамки
3, 4 ,5 – означает, что будут использованы четвертая, пятая и шестая
6, 7, 8 – означает, что будут использованы седьмая, восьмая, девятая
# Функция для отрисовки bounding box'ов.
def draw_outputs(img, outputs, class_names, white_list=None):
boxes, score, classes, nums = outputs
boxes, score, classes, nums = boxes[0], score[0], classes[0], nums[0]
wh = np.flip(img.shape[0:2])
for i in range(nums):
if class_names[int(classes[i])] not in white_list:
continue
x1y1 = tuple((np.array(boxes[i][0:2]) * wh).astype(np.int32))
x2y2 = tuple((np.array(boxes[i][2:4]) * wh).astype(np.int32))
img = cv2.rectangle(img, x1y1, x2y2, (255, 0, 0), 2)
img = cv2.putText(img, '{} {:.4f}'.format(
class_names[int(classes[i])], score[i]),
x1y1, cv2.FONT_HERSHEY_COMPLEX_SMALL, 1, (0, 0, 255), 2)
return imgТеперь пришло время для реализации YOLOv3. Идея заключается в том, чтобы использовать только сверточные слои. Так как их здесь 53, то самым простым способом является создание функции, в которую мы будем передавать важные параметры, меняющиеся от слоя к слою.
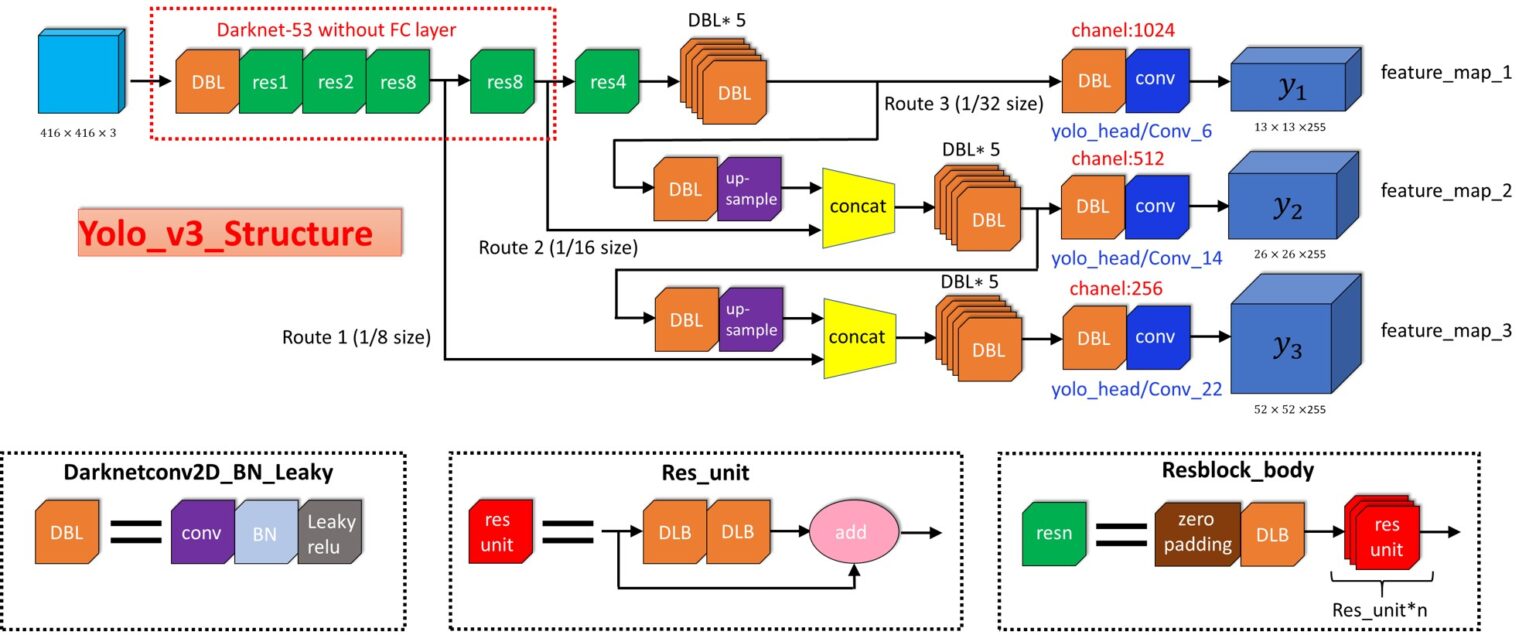
Остаточные блоки (Residual Blocks) в диаграмме архитектуры YOLOv3 применяются для изучения признаков. Остаточный блок содержит в себе несколько сверточных слоев и дополнительные связи для обхода этих слоев.

Создавая нашу модель, мы строим нашу модель с помощью функционального API, который будет легко использовать. С его помощью мы можем без труда определить ветви в нашей архитектуре (ResNet Block) и делить слои внутри архитектуры.
def DarknetConv(x, filters, size, strides=1, batch_norm=True):
if strides == 1:
padding = 'same'
else:
x = ZeroPadding2D(((1, 0), (1, 0)))(x)
padding = 'valid'
x = Conv2D(filters=filters, kernel_size=size,
strides=strides, padding=padding,
use_bias=not batch_norm, kernel_regularizer=l2(0.0005))(x)
if batch_norm:
x = BatchNormalization()(x)
x = LeakyReLU(alpha=0.1)(x)
return x
def DarknetResidual(x, filters):
previous = x
x = DarknetConv(x, filters // 2, 1)
x = DarknetConv(x, filters, 3)
x = Add()([previous , x])
return x
def DarknetBlock(x, filters, blocks):
x = DarknetConv(x, filters, 3, strides=2)
for _ in repeat(None, blocks):
x = DarknetResidual(x, filters)
return x
def Darknet(name=None):
x = inputs = Input([None, None, 3])
x = DarknetConv(x, 32, 3)
x = DarknetBlock(x, 64, 1)
x = DarknetBlock(x, 128, 2)
x = x_36 = DarknetBlock(x, 256, 8)
x = x_61 = DarknetBlock(x, 512, 8)
x = DarknetBlock(x, 1024, 4)
return tf.keras.Model(inputs, (x_36, x_61, x), name=name)
def YoloConv(filters, name=None):
def yolo_conv(x_in):
if isinstance(x_in, tuple):
inputs = Input(x_in[0].shape[1:]), Input(x_in[1].shape[1:])
x, x_skip = inputs
x = DarknetConv(x, filters, 1)
x = UpSampling2D(2)(x)
x = Concatenate()([x, x_skip])
else:
x = inputs = Input(x_in.shape[1:])
x = DarknetConv(x, filters, 1)
x = DarknetConv(x, filters * 2, 3)
x = DarknetConv(x, filters, 1)
x = DarknetConv(x, filters * 2, 3)
x = DarknetConv(x, filters, 1)
return Model(inputs, x, name=name)(x_in)
return yolo_conv
def YoloOutput(filters, anchors, classes, name=None):
def yolo_output(x_in):
x = inputs = Input(x_in.shape[1:])
x = DarknetConv(x, filters * 2, 3)
x = DarknetConv(x, anchors * (classes + 5), 1, batch_norm=False)
x = Lambda(lambda x: tf.reshape(x, (-1, tf.shape(x)[1], tf.shape(x)[2],
anchors, classes + 5)))(x)
return tf.keras.Model(inputs, x, name=name)(x_in)
return yolo_output
def yolo_boxes(pred, anchors, classes):
grid_size = tf.shape(pred)[1]
box_xy, box_wh, score, class_probs = tf.split(pred, (2, 2, 1, classes), axis=-1)
box_xy = tf.sigmoid(box_xy)
score = tf.sigmoid(score)
class_probs = tf.sigmoid(class_probs)
pred_box = tf.concat((box_xy, box_wh), axis=-1)
grid = tf.meshgrid(tf.range(grid_size), tf.range(grid_size))
grid = tf.expand_dims(tf.stack(grid, axis=-1), axis=2)
box_xy = (box_xy + tf.cast(grid, tf.float32)) / tf.cast(grid_size, tf.float32)
box_wh = tf.exp(box_wh) * anchors
box_x1y1 = box_xy - box_wh / 2
box_x2y2 = box_xy + box_wh / 2
bbox = tf.concat([box_x1y1, box_x2y2], axis=-1)
return bbox, score, class_probs, pred_boxТеперь определим функцию подавления не-максимумов.
def nonMaximumSuppression(outputs, anchors, masks, classes):
boxes, conf, out_type = [], [], []
for output in outputs:
boxes.append(tf.reshape(output[0], (tf.shape(output[0])[0], -1, tf.shape(output[0])[-1])))
conf.append(tf.reshape(output[1], (tf.shape(output[1])[0], -1, tf.shape(output[1])[-1])))
out_type.append(tf.reshape(output[2], (tf.shape(output[2])[0], -1, tf.shape(output[2])[-1])))
bbox = tf.concat(boxes, axis=1)
confidence = tf.concat(conf, axis=1)
class_probs = tf.concat(out_type, axis=1)
scores = confidence * class_probs
boxes, scores, classes, valid_detections = tf.image.combined_non_max_suppression(
boxes=tf.reshape(bbox, (tf.shape(bbox)[0], -1, 1, 4)),
scores=tf.reshape(
scores, (tf.shape(scores)[0], -1, tf.shape(scores)[-1])),
max_output_size_per_class=100,
max_total_size=100,
iou_threshold=yolo_iou_threshold,
score_threshold=yolo_score_threshold)
return boxes, scores, classes, valid_detectionsОсновная функция:
def YoloV3(size=None, channels=3, anchors=yolo_anchors,
masks=yolo_anchor_masks, classes=80, training=False):
x = inputs = Input([size, size, channels])
x_36, x_61, x = Darknet(name='yolo_darknet')(x)
x = YoloConv(512, name='yolo_conv_0')(x)
output_0 = YoloOutput(512, len(masks[0]), classes, name='yolo_output_0')(x)
x = YoloConv(256, name='yolo_conv_1')((x, x_61))
output_1 = YoloOutput(256, len(masks[1]), classes, name='yolo_output_1')(x)
x = YoloConv(128, name='yolo_conv_2')((x, x_36))
output_2 = YoloOutput(128, len(masks[2]), classes, name='yolo_output_2')(x)
if training:
return Model(inputs, (output_0, output_1, output_2), name='yolov3')
boxes_0 = Lambda(lambda x: yolo_boxes(x, anchors[masks[0]], classes),
name='yolo_boxes_0')(output_0)
boxes_1 = Lambda(lambda x: yolo_boxes(x, anchors[masks[1]], classes),
name='yolo_boxes_1')(output_1)
boxes_2 = Lambda(lambda x: yolo_boxes(x, anchors[masks[2]], classes),
name='yolo_boxes_2')(output_2)
outputs = Lambda(lambda x: nonMaximumSuppression(x, anchors, masks, classes),
name='nonMaximumSuppression')((boxes_0[:3], boxes_1[:3], boxes_2[:3]))
return Model(inputs, outputs, name='yolov3')Функция потерь:
def YoloLoss(anchors, classes=80, ignore_thresh=0.5):
def yolo_loss(y_true, y_pred):
pred_box, pred_obj, pred_class, pred_xywh = yolo_boxes(
y_pred, anchors, classes)
pred_xy = pred_xywh[..., 0:2]
pred_wh = pred_xywh[..., 2:4]
true_box, true_obj, true_class_idx = tf.split(
y_true, (4, 1, 1), axis=-1)
true_xy = (true_box[..., 0:2] + true_box[..., 2:4]) / 2
true_wh = true_box[..., 2:4] - true_box[..., 0:2]
box_loss_scale = 2 - true_wh[..., 0] * true_wh[..., 1]
grid_size = tf.shape(y_true)[1]
grid = tf.meshgrid(tf.range(grid_size), tf.range(grid_size))
grid = tf.expand_dims(tf.stack(grid, axis=-1), axis=2)
true_xy = true_xy * tf.cast(grid_size, tf.float32) - \
tf.cast(grid, tf.float32)
true_wh = tf.math.log(true_wh / anchors)
true_wh = tf.where(tf.math.is_inf(true_wh),
tf.zeros_like(true_wh), true_wh)
obj_mask = tf.squeeze(true_obj, -1)
true_box_flat = tf.boolean_mask(true_box, tf.cast(obj_mask, tf.bool))
best_iou = tf.reduce_max(intersectionOverUnion(
pred_box, true_box_flat), axis=-1)
ignore_mask = tf.cast(best_iou < ignore_thresh, tf.float32)
xy_loss = obj_mask * box_loss_scale * \
tf.reduce_sum(tf.square(true_xy - pred_xy), axis=-1)
wh_loss = obj_mask * box_loss_scale * \
tf.reduce_sum(tf.square(true_wh - pred_wh), axis=-1)
obj_loss = binary_crossentropy(true_obj, pred_obj)
obj_loss = obj_mask * obj_loss + \
(1 - obj_mask) * ignore_mask * obj_loss
class_loss = obj_mask * sparse_categorical_crossentropy(
true_class_idx, pred_class)
xy_loss = tf.reduce_sum(xy_loss, axis=(1, 2, 3))
wh_loss = tf.reduce_sum(wh_loss, axis=(1, 2, 3))
obj_loss = tf.reduce_sum(obj_loss, axis=(1, 2, 3))
class_loss = tf.reduce_sum(class_loss, axis=(1, 2, 3))
return xy_loss + wh_loss + obj_loss + class_loss
return yolo_lossФункция "преобразовать цели" возвращает кортеж из форм:
(
[N, 13, 13, 3, 6],
[N, 26, 26, 3, 6],
[N, 52, 52, 3, 6]
)Где N – число меток в пакете, а число 6 означает [x, y, w, h, obj, class] bounding box'а.
@tf.function
def transform_targets_for_output(y_true, grid_size, anchor_idxs, classes):
N = tf.shape(y_true)[0]
y_true_out = tf.zeros(
(N, grid_size, grid_size, tf.shape(anchor_idxs)[0], 6))
anchor_idxs = tf.cast(anchor_idxs, tf.int32)
indexes = tf.TensorArray(tf.int32, 1, dynamic_size=True)
updates = tf.TensorArray(tf.float32, 1, dynamic_size=True)
idx = 0
for i in tf.range(N):
for j in tf.range(tf.shape(y_true)[1]):
if tf.equal(y_true[i][j][2], 0):
continue
anchor_eq = tf.equal(
anchor_idxs, tf.cast(y_true[i][j][5], tf.int32))
if tf.reduce_any(anchor_eq):
box = y_true[i][j][0:4]
box_xy = (y_true[i][j][0:2] + y_true[i][j][2:4]) / 2
anchor_idx = tf.cast(tf.where(anchor_eq), tf.int32)
grid_xy = tf.cast(box_xy // (1/grid_size), tf.int32)
indexes = indexes.write(
idx, [i, grid_xy[1], grid_xy[0], anchor_idx[0][0]])
updates = updates.write(
idx, [box[0], box[1], box[2], box[3], 1, y_true[i][j][4]])
idx += 1
return tf.tensor_scatter_nd_update(
y_true_out, indexes.stack(), updates.stack())
def transform_targets(y_train, anchors, anchor_masks, classes):
outputs = []
grid_size = 13
anchors = tf.cast(anchors, tf.float32)
anchor_area = anchors[..., 0] * anchors[..., 1]
box_wh = y_train[..., 2:4] - y_train[..., 0:2]
box_wh = tf.tile(tf.expand_dims(box_wh, -2),
(1, 1, tf.shape(anchors)[0], 1))
box_area = box_wh[..., 0] * box_wh[..., 1]
intersection = tf.minimum(box_wh[..., 0], anchors[..., 0]) * \
tf.minimum(box_wh[..., 1], anchors[..., 1])
iou = intersection / (box_area + anchor_area - intersection)
anchor_idx = tf.cast(tf.argmax(iou, axis=-1), tf.float32)
anchor_idx = tf.expand_dims(anchor_idx, axis=-1)
y_train = tf.concat([y_train, anchor_idx], axis=-1)
for anchor_idxs in anchor_masks:
outputs.append(transform_targets_for_output(
y_train, grid_size, anchor_idxs, classes))
grid_size *= 2
return tuple(outputs) # [x, y, w, h, obj, class]
def preprocess_image(x_train, size):
return (tf.image.resize(x_train, (size, size))) / 255Теперь мы можем создать нашу модель, загрузить веса и названия классов. В COCO датасете их 80.
yolo = YoloV3(classes=num_classes)
load_darknet_weights(yolo, weightyolov3)
yolo.save_weights(checkpoints)
class_names = ["person", "bicycle", "car", "motorbike", "aeroplane", "bus", "train", "truck",
"boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench",
"bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard",
"sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",
"banana","apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut",
"cake","chair", "sofa", "pottedplant", "bed", "diningtable", "toilet", "tvmonitor", "laptop",
"mouse","remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink",
"refrigerator","book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush"]
def detect_objects(img_path, white_list=None):
image = img_path # Путь к изображению.
img = tf.image.decode_image(open(image, 'rb').read(), channels=3)
img = tf.expand_dims(img, 0)
img = preprocess_image(img, size)
boxes, scores, classes, nums = yolo(img)
img = cv2.imread(image)
img = draw_outputs(img, (boxes, scores, classes, nums), class_names, white_list)
cv2.imwrite('detected_{:}'.format(img_path), img)
detected = Image.open('detected_{:}'.format(img_path))
detected.show()
detect_objects('test.jpg', ['bear'])
Итог
В этой статье мы поговорили об отличительных особенностях YOLOv3 и её преимуществах перед другими моделями. Мы рассмотрели способ реализации с использованием TensorFlow 2.0 (TF должен быть не менее версией 2.0).
Ссылки
Полная реализация YOLOv3 на Tensorflow 2.0
Реализация YOLOv3 из текущей статьи
YOLOv3 - Joseph Redmon



 файла в 1С-Битрикс")
