
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!

Цель проекта
Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности... Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.

Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства - от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
HANNING ELEKTRO-WERKE GmbH & Co. KG.

Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.

OMRON 3G3MX2-A4040-E.

Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.

Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Invertek OPTIDRIVE P2

Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае - Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.

И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.

В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе. Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
ЧП состоит из трех основных плат:
Управляющая плата с микроконтроллером и внешними интерфейсами.
Плата DC шины, на которой расположен блок питания и блок конденсаторов
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.

Компоненты ЧП
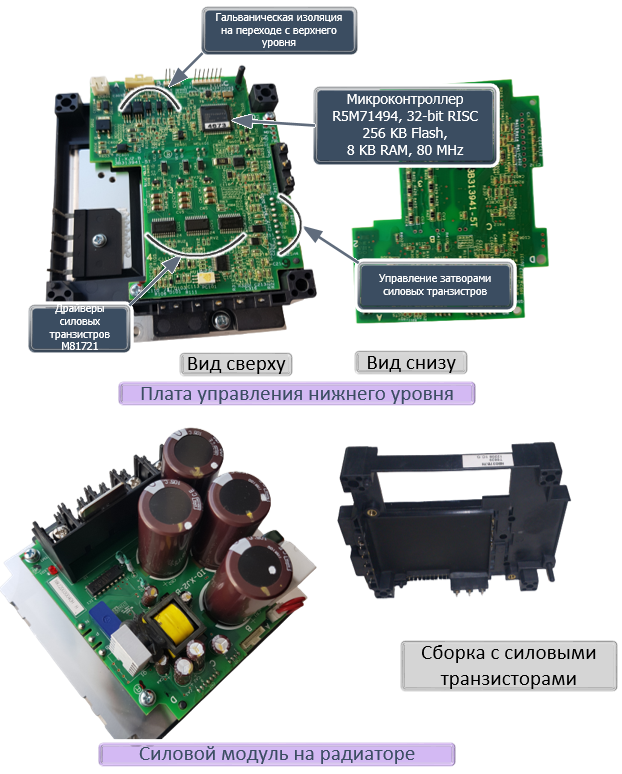
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
интерфейс для подключения внешнего квадратурного энкодера
интерфейс RS232
интерфейс CAN
интерфейс USB
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8. Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.



Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310...340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.


Силовая плата
Главным элементом всего устройства является IGBT модуль.

В нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.

Немного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.


Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.

ЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать ("Practical Variable Speed Drives and Power Electronics", Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:

Используемы в таблице обозначения:
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
I(A) – действующее значение тока в амперах
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
I peak (A) – пиковое значение тока в амперах
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
|P| (W) – Активная потребляемая мощность в ваттах
Q (Var) – Реактивная потребляемая мощность. Единица измерения – вар
S (VA) – Полная потребляемая мощность. Единица измерения ВА
PF - Коэффициент мощности
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
")
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.

Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах - везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.

В результате у нас получился вот такой ЧП

Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса. Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Все материалы по проекту частотного преобразователя лежат и накапливаются тут - https://github.com/Indemsys/Frequency_Inverter



