
В обычное время механизатор зарабатывает около 30 тысяч рублей в месяц. Но всё резко меняется во время уборки урожая, когда механизатор на время становится оператором комбайна — комбайнёром, за этот промежуток он получит до 150 тысяч рублей. Есть буквально две недели, когда нужно собрать всё, во что вы целый год вкладывали огромное количество денег за работу, удобрения, солярку и так далее. Работать можно примерно с восьми утра (настроить машину, в девять начать) до темноты, потому что роса и ночная влажность резко ухудшают качество зерна. На износ. И на третий-четвёртый день начинаются проблемы с авариями или перемалыванием не того и не так.
Со стороны кажется, что задача — проехать на комбайне по полю «змейкой» и «перемолоть» всю пшеницу или другую культуру. На деле всё далеко не так. Оператор должен следить за сотнями вещей и при этом постоянно смотреть на кромку поля, чтобы двигаться ровно. Представьте себе, что вы едете 12–14 часов по трассе на скорости 120 км/час за человеком, который раз в полчаса неожиданно тормозит. Примерно то же чувствует оператор: работа невероятно монотонная, но при этом постоянно нужно быть готовым к сюрпризу.

Сюрприз может выглядеть так. Пока мы ездили «в поля», не видели ни одного целого комбайна без следов сварки.
Фактически комбайнёр следит за процессом обработки зерна (одно рабочее место) и при этом ведёт технику (другое рабочее место). Но только это один человек. Первое следствие — страдает что-то одно. Поскольку, если плохо вести, можно случайно перемолоть камень или человека на поле, и страдает обычно качество уборки зерна.
Часть работы легко автоматизируется. Сейчас расскажу, что именно мы сделали и как мы модифицируем даже довольно старые комбайны своими роботами.
Итак, две недели оператор комбайна работает на износ. Оплата у него состоит из оклада (тех самых 30 тысяч в регионе) и премии за объём полученного зерна (что позволяет получить до 150 тысяч рублей в регионе). При этом агроном смотрит на равномерность покрытия поля — если в процессе останутся «петухи» (то есть непрокошенные участки из-за неровного поворота), на их сбор нужно будет потратить много лишних ресурсов: это ГСМ, амортизация, прогон транспорта, время. Как правило, такие участки «дорабатываются» утром, и КПД работы комбайна там очень низкий. А от снижения себестоимости уборки очень сильно зависит весь бизнес-эффект хозяйства: на рынок они повлиять не могут, но могут уменьшить стоимость зерна для себя. Поэтому есть следствия:
По статистике механизатор из-за усталости к концу смены оставляет вне захвата до одного метра от длины жатки. При скорости движения комбайна в 10 км/ч и уменьшении захвата на один метр за четыре часа он «недоуберёт» четыре га. Кроме потери времени на уборку, увеличивается расход ГСМ. При уровне расхода топлива 20 л/га прямая потеря в топливе (которое потребуется для уборки упущенных площадей) составит: 4 га х 20 л х 45 руб./л = 3 600 руб./за смену. На уборку оставшегося участка в следующую смену уйдёт дополнительно три часа работы. За четыре дня механизатор увеличивает продолжительность своей работы на один день. За сезон время уборки урожая увеличивается из-за ошибки механизатора на 25 %.
За 20 дней потеря на топливе составит 20 х 3 600 руб. = 72 000 рублей, парк из 10 машин теряет за это время на ГСМ 720 000 рублей.
Вот видео, где мы показываем хозяйству, как работает робот. Оператор комбайна снимает на видео действия машины. Это реакция человека, внезапно столкнувшегося с будущим:
Ещё одна важная вещь — механизаторы часто приезжают вахтовым методом. Владелец поля или агроном их не знает, не знает, где работали, как работали. Он понимает, что они будут гоняться по полям за максимальным бонусом. Ему нужна эта система, чтобы обезопасить свою технику.
В среднем хозяйстве, по нашей статистике, происходит одно-два серьёзных столкновения в год. На поле работает не один комбайн, а несколько. По дороге комбайнёру могут встретиться другой комбайн, трактор, дерево, неожиданно вышедший на поле столб ЛЭП, человек (в том числе другой комбайнёр, отошедший в туалет), корова и другие препятствия.
Я знаю случай, когда оператор наблюдал за кромкой, а потом внезапно увидел, что из комбайна начинает лететь что-то красное. На поле лежал человек, его подхватило в жатку и начало перерабатывать. Механизатора оправдали: следствие выяснило, что это вроде бы местная братва бросила труп на поле. Но он уехал в психиатрический стационар. Вот ещё пара случаев: подъехал дозаправиться, сбил водителя, а это загадочный «Адам».
Понятно, что, когда что-то прячется в культуре, почти невозможно предотвратить столкновение с этим. Поэтому, кстати, на полях нет больших камней: их убирают ещё до посева (а маленькие попадают в камнеуловители комбайна). Оператор сидит довольно высоко, и большинство препятствий видно заранее. Вопрос в том, куда он смотрит (вбок на кромку, на пульт или вперёд) и насколько хорошая реакция.
По моим данным, чаще всего повреждаются выгрызные хоботы и бьются жатки. Одна из частых причин — при движении группой (например, клином) неравномерная скорость впереди идущего комбайна.
Наш робот позволяет держать расстояние перед впереди идущим.
«Когнитивный пилот» пользуется видеокамерой, смотрящей из кабины чуть выше места оператора, и распознаёт препятствия. Робот знает, что столбы и деревья стоят на месте, но рассчитывает векторы движения людей, коров и тракторов. Когда ситуация становится просто требующей внимания, происходит уведомление. При критических обстоятельствах комбайн резко остановится.
Это означает, что мы экономим несколько дней ремонта во время сбора урожая. То есть ремонт в такое время — это не только стоимость частей и работы, но и огромные потери зерна.

Чем может управлять оператор? Первое — скорость вращения мотовилы (это устройство вроде шнека, которое поджимает колосья под срезной аппарат). Скорость непосредственно зависит от типа культуры (под кукурузу — одна, под пшеницу — другая) и от зрелости культуры.

Особенность труда комбайнёра в том, что это сложноалгоритмизируемая задача со множеством чисто опытных предположений. С другой стороны, в самом комбайне пишется почти полный лог действий, и можно установить процент потерь зерна из-за неверных режимов. Не хватает входных данных: влажности, типа культуры, её конкретного сорта, региона (культура по виду и размеру очень сильно отличается от почвы и климата), степени зрелости. Если соединить всё это, то можно получить либо натренированную за 20 лет опыта нейросеть в голове мастерски работающего оператора, либо же робота, который будет делать то же самое за него.
Мастерски работающие операторы сейчас умирают. Почти все эффективные механизаторы обучались при СССР, после чего технологические секреты этой цивилизации были утеряны. Конкретно ослабло обучение, и приходящие «молодые», естественно, работают хуже. Это нормально почти для всех рабочих профессий, но конкретно здесь наш робот как нельзя больше востребован и из-за этого эффекта тоже.
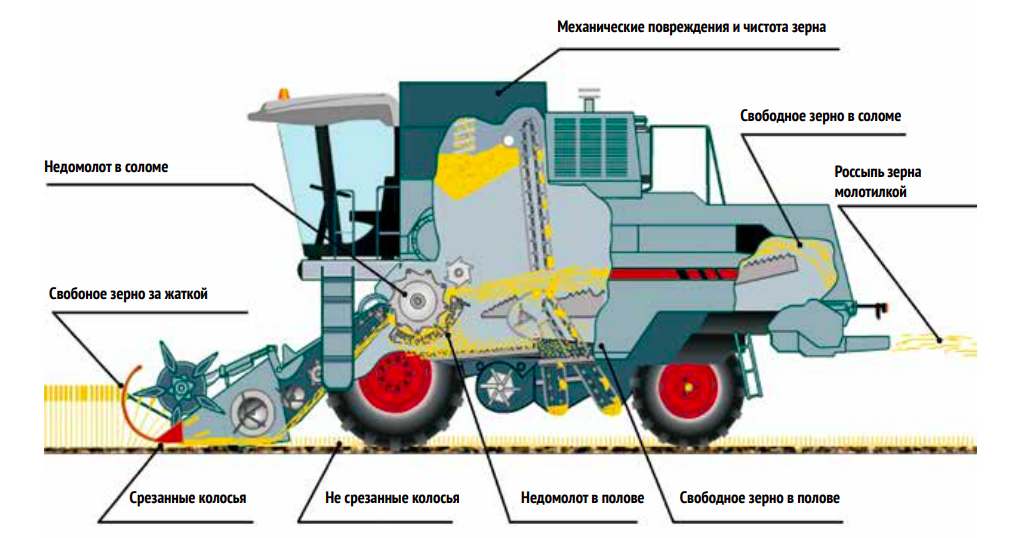
Итак, если скорость вращения будет выше оптимальной для данной ситуации — начнётся вышибание зерновых жаткой, когда ещё до попадания в основную обработку зерно начнёт сыпаться на землю под комбайн. Это от трёх до десяти процентов потерь за неверно выбранный режим. Если скорость дать меньше — колосья будут загибаться не до конца, и падать они начнут на землю, а не в жатку. Тот же результат.
Если зерно не до конца дозрело — уже крупное, но ещё плотно в колосе, — колос с ним легко можно считать единым объектом. А вот если оно чуть перезрелое, то по колосу достаточно легко стукнуть, и он начнёт осыпаться. На одном поле под разные проходы надо менять настройки: бывает, что немного полеглая масса или неполеглая. Где-то кусочек поля на возвышенности, а другой конец — в низине. В низине больше влаги, и там стеблестой более высокий.
Нужно держать кромку, постоянно менять скорость движения комбайна в зависимости от особенностей участка (на полеглом зерне — до одного-двух километров в час, на обычной культуре — в среднем шесть–восемь километров в час), постоянно настраивать скорость вращения мотовилы.
А механизатор получает за объём.
Механизаторов на поле много. А количество культуры — ограниченное. Поэтому они, естественно, хотят заработать больше. У них нет задачи сэкономить для хозяйства, у них есть задача собрать лично как можно больше зерна. Поэтому вместо того, чтобы двигаться с нужной скоростью и подбирать все десятки параметров, достаточно двигаться так, чтобы агроном не выгнал из хозяйства на следующий урожай. То есть с максимально возможной скоростью до того, как он начнёт крушить и материться.
На практике это означает, что КПД сбора зерновых далеко не оптимальный. Старые мастера в начале смены показывают отличные показатели, но сохранить их до конца смены тяжело. «Молодые» сосредотачиваются на движении и работают с низким КПД, стараясь набрать больше зерна за смену. Уборочная прошла, первый дождик — зелёные полосы стоят. Это кто-то посеял зерно. Это потери.
Следующий тип настроек — это то, что происходит внутри комбайна. Колосья на транспортёре от жатки попадают в сепарирующий аппарат. Он может отличаться по конструкции, но в общем случае там два барабана, под которыми находятся сита. Барабаны работают на выбивание зерна из колосьев с помощью молотков. Просто стучат по массе, и зерно высыпается в сито.
Очень важно отрегулировать подбарабанье по объёму массы (то есть разные режимы для разных скоростей или разные скорости движения для разных участков поля: это зависит от плотности колосьев, от размера и плотности зерна, от относительной крупности зерна и от лёгкости его выбивания из колоса, то есть зрелости и влажности). Незрелое зерно надо бить сильнее, зрелое особо стучать не надо.
По факту это означает, что перед каждым отличающимся участком поля нужно перенастраивать эти параметры. Моя практика показывает, что этого не делает никто, потому что боится лезть в настройки или просто не хочет с ними разбираться. На современных комбайнах стоят системы датчиков, которые показывают на мониторе процесс. На старых такого нет. Уже прошли времена, когда надо было крутить что-то физическое, чтобы поменять режимы работы механизма. Сейчас можно регулировать всё в любой момент. Но мой примерно 12-летний опыт продаж показывает, что после продажи комбайна приезжает дилер, настраивает основные характеристики и пишет их в бумажку. Примерно из 200 комбайнов, в списании которых я участвовал, я видел ровно три с параметрами, которые отличались от этой бумажки дилера.
То есть здесь просто идут потери оттого, что этой частью работы обычно жертвуют, чтобы не растрачивать внимания. Я видел, как при уведомлениях «меньше скорость, потери», «недомолот, уменьши подбарабанье» игнорируют алерты. «Деды так работали — на фига туда лезть? Если что-то пойдёт не так, простою же весь сезон». В итоге концентрируются на вождении.
Дальше идёт доочистка зерна. Есть роторные и клавишные механизмы, клавишных на рынке намного больше. Солома протягивается через клавишный механизм, внизу — тоже сепаратор. Доочистка и довыбивание зерна заканчиваются тем, что вся масса попадает в ветра (или аналогичный механизм), когда поток воздуха сдувает всё лёгкое (мелкие куски соломы, куски листьев) в сторону, а зерно падает в бункер. Ветра нужно контролировать жёстко, но, к счастью, можно выставить их перед сменой утром. Рапс — нужен минимальный поток воздуха: семечка очень лёгкая. Кукуруза — максимальный поток.
Опять же на практике это выглядит так: приходит 64-летний Михаил Кузьмич, берёт колос, растирает зерно в руках, потом настраивает ветра себе на участок. Остальные механизаторы подходят, смотрят, копируют настройки.

Очень частая картина.
Уборка может идти либо со сбросом зерна во что-то, что едет рядом с комбайном по уже прокошенному участку, либо нужно время от времени вызывать трактор для выгрузки собранной культуры.
Если речь идёт про движение рядом, то нужно следить, чтобы поток зерна попадал в транспорт. Это значит, что надо напряжённо смотреть теперь в две стороны: на пульт и вперёд.
Если речь идёт про вызов — надо следить за заполнением бункера и думать, как транспорт будет подъезжать, то есть решать стратегическую задачу оптимизации его вызова. Как мы знаем, люди обычно решают стратегические задачи с помощью неидеальных жадных алгоритмов, поэтому здесь тоже случаются потери топлива. К счастью, это наименьшая из проблем на поле, поэтому эту часть мы пока не трогаем.
Гораздо интереснее ситуация становится, когда комбайны двигаются не загонками (по своим участкам), а клином. То есть вместе. Здесь нужно следить за ведущим и другими комбайнами в дополнение.
Одна из самых нагруженных частей работы — следить за траекторией движения. То есть рулить.
Прошлое поколение автоматизации решало задачу ведения с помощью GPS-устройств. Вот пример того, как это плохо и достаточно регулярно заканчивается. Напомню, нужна точность 20 сантиметров. В России с ними проблема: если нет активной поправки через Интернет, то нужна наземная станция на 15 км радиусом. Наземная станция стоит денег, и, более того, нужно покупать пакеты сигналов, чтобы она работала, то есть подписку. GPS-комбайны очень «косые» — да, они могут убрать идеальное поле сами, но плохо делают повороты и не следят за ситуацией. При искажениях сигнала оставляют «петухов».
Мы сначала думали про GPS + видеоаналитику, но очень быстро выяснилось, что достаточно только видеоаналитики.
Сейчас комбайн умеет двигаться по плану в загонке, умеет распознавать препятствия и тормозить перед ними, умеет согласовывать движение с транспортом для зерна и другими машинами в клине.
GPS требует долгого программирования карты по навигационным точкам. Это сложный интерфейс, а сложные интерфейсы в поле не работают. Мы сделали куда проще: автопилот видит: «Ого, поле!» — и предлагает передать ему управление. Всё.
Оператор может следить за жаткой и особенностями культуры. Робот рулит.
Режимы:
 По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.
По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.
Кроме комбайна, ещё возможно установить ко-пилота на трактор, косилку или опрыскиватель.
Теперь вы примерно представляете, что нужно, чтобы к вам на стол попали хлеб, кукуруза, макароны, гречка и где там можно накосячить. Я пока на этом остановлюсь, потому что много лет работал в сельском хозяйстве с техникой, а не в разработке и не с нейросетями, но в следующем посте мой коллега из разработки расскажет, как именно всё это работает и в чём конкретно были сложности всё это сделать за два года. А они были, уж поверьте.
Общий экономический эффект — снижение себестоимости зерна на 2,5–5 %. Увы, это аналитика, а не АБ-тест (его сложно провести из-за того, что все участки разные, механизаторы — тоже, и это только второй год работы), но, если интересно, могу рассказать, как мы его рассчитывали.
Со стороны кажется, что задача — проехать на комбайне по полю «змейкой» и «перемолоть» всю пшеницу или другую культуру. На деле всё далеко не так. Оператор должен следить за сотнями вещей и при этом постоянно смотреть на кромку поля, чтобы двигаться ровно. Представьте себе, что вы едете 12–14 часов по трассе на скорости 120 км/час за человеком, который раз в полчаса неожиданно тормозит. Примерно то же чувствует оператор: работа невероятно монотонная, но при этом постоянно нужно быть готовым к сюрпризу.
Сюрприз может выглядеть так. Пока мы ездили «в поля», не видели ни одного целого комбайна без следов сварки.
Фактически комбайнёр следит за процессом обработки зерна (одно рабочее место) и при этом ведёт технику (другое рабочее место). Но только это один человек. Первое следствие — страдает что-то одно. Поскольку, если плохо вести, можно случайно перемолоть камень или человека на поле, и страдает обычно качество уборки зерна.
Часть работы легко автоматизируется. Сейчас расскажу, что именно мы сделали и как мы модифицируем даже довольно старые комбайны своими роботами.
Повороты
Итак, две недели оператор комбайна работает на износ. Оплата у него состоит из оклада (тех самых 30 тысяч в регионе) и премии за объём полученного зерна (что позволяет получить до 150 тысяч рублей в регионе). При этом агроном смотрит на равномерность покрытия поля — если в процессе останутся «петухи» (то есть непрокошенные участки из-за неровного поворота), на их сбор нужно будет потратить много лишних ресурсов: это ГСМ, амортизация, прогон транспорта, время. Как правило, такие участки «дорабатываются» утром, и КПД работы комбайна там очень низкий. А от снижения себестоимости уборки очень сильно зависит весь бизнес-эффект хозяйства: на рынок они повлиять не могут, но могут уменьшить стоимость зерна для себя. Поэтому есть следствия:
- Поле покрывается маршрутами комбайнов так, чтобы обеспечить непрерывное движение для полного заполнения.
- Самый ответственный момент — повороты с огромной жаткой на девять метров в обе стороны. Дальше надо будет ехать вдоль кромки с трудом. Ближайшая аналогия такая: это как ехать левыми колесами машины по разметке дорожной. Можно это делать хорошо полчаса, но за весь день — точно заедем на встречку. А если заехали на встречку — оставили непрокошенный кусок. Поэтому механизаторы сознательно едут, сохраняя расстояние между краем жатки и кромкой поля. А непрокошенный участок — это ещё соляра, ещё износ, ещё прогон трактора, и самое главное — ещё время. В итоге с утра — непрокошенные участки 30–50 сантиметров, а к вечеру — около метра. Вся эта культура потом не собирается с большими потерями денег.
- Поэтому важно двигаться очень ровно. Мы сейчас отлично двигаемся по кромке (самая долгая и неприятная часть вождения, которая автоматизирует 90 % времени) и испытываем повороты.
По статистике механизатор из-за усталости к концу смены оставляет вне захвата до одного метра от длины жатки. При скорости движения комбайна в 10 км/ч и уменьшении захвата на один метр за четыре часа он «недоуберёт» четыре га. Кроме потери времени на уборку, увеличивается расход ГСМ. При уровне расхода топлива 20 л/га прямая потеря в топливе (которое потребуется для уборки упущенных площадей) составит: 4 га х 20 л х 45 руб./л = 3 600 руб./за смену. На уборку оставшегося участка в следующую смену уйдёт дополнительно три часа работы. За четыре дня механизатор увеличивает продолжительность своей работы на один день. За сезон время уборки урожая увеличивается из-за ошибки механизатора на 25 %.
За 20 дней потеря на топливе составит 20 х 3 600 руб. = 72 000 рублей, парк из 10 машин теряет за это время на ГСМ 720 000 рублей.
Вот видео, где мы показываем хозяйству, как работает робот. Оператор комбайна снимает на видео действия машины. Это реакция человека, внезапно столкнувшегося с будущим:
Ещё одна важная вещь — механизаторы часто приезжают вахтовым методом. Владелец поля или агроном их не знает, не знает, где работали, как работали. Он понимает, что они будут гоняться по полям за максимальным бонусом. Ему нужна эта система, чтобы обезопасить свою технику.
Столкновения
В среднем хозяйстве, по нашей статистике, происходит одно-два серьёзных столкновения в год. На поле работает не один комбайн, а несколько. По дороге комбайнёру могут встретиться другой комбайн, трактор, дерево, неожиданно вышедший на поле столб ЛЭП, человек (в том числе другой комбайнёр, отошедший в туалет), корова и другие препятствия.
Я знаю случай, когда оператор наблюдал за кромкой, а потом внезапно увидел, что из комбайна начинает лететь что-то красное. На поле лежал человек, его подхватило в жатку и начало перерабатывать. Механизатора оправдали: следствие выяснило, что это вроде бы местная братва бросила труп на поле. Но он уехал в психиатрический стационар. Вот ещё пара случаев: подъехал дозаправиться, сбил водителя, а это загадочный «Адам».
Понятно, что, когда что-то прячется в культуре, почти невозможно предотвратить столкновение с этим. Поэтому, кстати, на полях нет больших камней: их убирают ещё до посева (а маленькие попадают в камнеуловители комбайна). Оператор сидит довольно высоко, и большинство препятствий видно заранее. Вопрос в том, куда он смотрит (вбок на кромку, на пульт или вперёд) и насколько хорошая реакция.
По моим данным, чаще всего повреждаются выгрызные хоботы и бьются жатки. Одна из частых причин — при движении группой (например, клином) неравномерная скорость впереди идущего комбайна.
Наш робот позволяет держать расстояние перед впереди идущим.
«Когнитивный пилот» пользуется видеокамерой, смотрящей из кабины чуть выше места оператора, и распознаёт препятствия. Робот знает, что столбы и деревья стоят на месте, но рассчитывает векторы движения людей, коров и тракторов. Когда ситуация становится просто требующей внимания, происходит уведомление. При критических обстоятельствах комбайн резко остановится.
Это означает, что мы экономим несколько дней ремонта во время сбора урожая. То есть ремонт в такое время — это не только стоимость частей и работы, но и огромные потери зерна.
Скорость движения и другие настройки
Чем может управлять оператор? Первое — скорость вращения мотовилы (это устройство вроде шнека, которое поджимает колосья под срезной аппарат). Скорость непосредственно зависит от типа культуры (под кукурузу — одна, под пшеницу — другая) и от зрелости культуры.
Особенность труда комбайнёра в том, что это сложноалгоритмизируемая задача со множеством чисто опытных предположений. С другой стороны, в самом комбайне пишется почти полный лог действий, и можно установить процент потерь зерна из-за неверных режимов. Не хватает входных данных: влажности, типа культуры, её конкретного сорта, региона (культура по виду и размеру очень сильно отличается от почвы и климата), степени зрелости. Если соединить всё это, то можно получить либо натренированную за 20 лет опыта нейросеть в голове мастерски работающего оператора, либо же робота, который будет делать то же самое за него.
Мастерски работающие операторы сейчас умирают. Почти все эффективные механизаторы обучались при СССР, после чего технологические секреты этой цивилизации были утеряны. Конкретно ослабло обучение, и приходящие «молодые», естественно, работают хуже. Это нормально почти для всех рабочих профессий, но конкретно здесь наш робот как нельзя больше востребован и из-за этого эффекта тоже.
Итак, если скорость вращения будет выше оптимальной для данной ситуации — начнётся вышибание зерновых жаткой, когда ещё до попадания в основную обработку зерно начнёт сыпаться на землю под комбайн. Это от трёх до десяти процентов потерь за неверно выбранный режим. Если скорость дать меньше — колосья будут загибаться не до конца, и падать они начнут на землю, а не в жатку. Тот же результат.
Если зерно не до конца дозрело — уже крупное, но ещё плотно в колосе, — колос с ним легко можно считать единым объектом. А вот если оно чуть перезрелое, то по колосу достаточно легко стукнуть, и он начнёт осыпаться. На одном поле под разные проходы надо менять настройки: бывает, что немного полеглая масса или неполеглая. Где-то кусочек поля на возвышенности, а другой конец — в низине. В низине больше влаги, и там стеблестой более высокий.
Нужно держать кромку, постоянно менять скорость движения комбайна в зависимости от особенностей участка (на полеглом зерне — до одного-двух километров в час, на обычной культуре — в среднем шесть–восемь километров в час), постоянно настраивать скорость вращения мотовилы.
А механизатор получает за объём.
Механизаторов на поле много. А количество культуры — ограниченное. Поэтому они, естественно, хотят заработать больше. У них нет задачи сэкономить для хозяйства, у них есть задача собрать лично как можно больше зерна. Поэтому вместо того, чтобы двигаться с нужной скоростью и подбирать все десятки параметров, достаточно двигаться так, чтобы агроном не выгнал из хозяйства на следующий урожай. То есть с максимально возможной скоростью до того, как он начнёт крушить и материться.
На практике это означает, что КПД сбора зерновых далеко не оптимальный. Старые мастера в начале смены показывают отличные показатели, но сохранить их до конца смены тяжело. «Молодые» сосредотачиваются на движении и работают с низким КПД, стараясь набрать больше зерна за смену. Уборочная прошла, первый дождик — зелёные полосы стоят. Это кто-то посеял зерно. Это потери.
Обработка колосьев
Следующий тип настроек — это то, что происходит внутри комбайна. Колосья на транспортёре от жатки попадают в сепарирующий аппарат. Он может отличаться по конструкции, но в общем случае там два барабана, под которыми находятся сита. Барабаны работают на выбивание зерна из колосьев с помощью молотков. Просто стучат по массе, и зерно высыпается в сито.
Очень важно отрегулировать подбарабанье по объёму массы (то есть разные режимы для разных скоростей или разные скорости движения для разных участков поля: это зависит от плотности колосьев, от размера и плотности зерна, от относительной крупности зерна и от лёгкости его выбивания из колоса, то есть зрелости и влажности). Незрелое зерно надо бить сильнее, зрелое особо стучать не надо.
По факту это означает, что перед каждым отличающимся участком поля нужно перенастраивать эти параметры. Моя практика показывает, что этого не делает никто, потому что боится лезть в настройки или просто не хочет с ними разбираться. На современных комбайнах стоят системы датчиков, которые показывают на мониторе процесс. На старых такого нет. Уже прошли времена, когда надо было крутить что-то физическое, чтобы поменять режимы работы механизма. Сейчас можно регулировать всё в любой момент. Но мой примерно 12-летний опыт продаж показывает, что после продажи комбайна приезжает дилер, настраивает основные характеристики и пишет их в бумажку. Примерно из 200 комбайнов, в списании которых я участвовал, я видел ровно три с параметрами, которые отличались от этой бумажки дилера.
То есть здесь просто идут потери оттого, что этой частью работы обычно жертвуют, чтобы не растрачивать внимания. Я видел, как при уведомлениях «меньше скорость, потери», «недомолот, уменьши подбарабанье» игнорируют алерты. «Деды так работали — на фига туда лезть? Если что-то пойдёт не так, простою же весь сезон». В итоге концентрируются на вождении.
Дальше идёт доочистка зерна. Есть роторные и клавишные механизмы, клавишных на рынке намного больше. Солома протягивается через клавишный механизм, внизу — тоже сепаратор. Доочистка и довыбивание зерна заканчиваются тем, что вся масса попадает в ветра (или аналогичный механизм), когда поток воздуха сдувает всё лёгкое (мелкие куски соломы, куски листьев) в сторону, а зерно падает в бункер. Ветра нужно контролировать жёстко, но, к счастью, можно выставить их перед сменой утром. Рапс — нужен минимальный поток воздуха: семечка очень лёгкая. Кукуруза — максимальный поток.
Опять же на практике это выглядит так: приходит 64-летний Михаил Кузьмич, берёт колос, растирает зерно в руках, потом настраивает ветра себе на участок. Остальные механизаторы подходят, смотрят, копируют настройки.
Очень частая картина.
Взаимодействие с трактором
Уборка может идти либо со сбросом зерна во что-то, что едет рядом с комбайном по уже прокошенному участку, либо нужно время от времени вызывать трактор для выгрузки собранной культуры.
Если речь идёт про движение рядом, то нужно следить, чтобы поток зерна попадал в транспорт. Это значит, что надо напряжённо смотреть теперь в две стороны: на пульт и вперёд.
Если речь идёт про вызов — надо следить за заполнением бункера и думать, как транспорт будет подъезжать, то есть решать стратегическую задачу оптимизации его вызова. Как мы знаем, люди обычно решают стратегические задачи с помощью неидеальных жадных алгоритмов, поэтому здесь тоже случаются потери топлива. К счастью, это наименьшая из проблем на поле, поэтому эту часть мы пока не трогаем.
Гораздо интереснее ситуация становится, когда комбайны двигаются не загонками (по своим участкам), а клином. То есть вместе. Здесь нужно следить за ведущим и другими комбайнами в дополнение.
Точки улучшения
Что может робот
Одна из самых нагруженных частей работы — следить за траекторией движения. То есть рулить.
Прошлое поколение автоматизации решало задачу ведения с помощью GPS-устройств. Вот пример того, как это плохо и достаточно регулярно заканчивается. Напомню, нужна точность 20 сантиметров. В России с ними проблема: если нет активной поправки через Интернет, то нужна наземная станция на 15 км радиусом. Наземная станция стоит денег, и, более того, нужно покупать пакеты сигналов, чтобы она работала, то есть подписку. GPS-комбайны очень «косые» — да, они могут убрать идеальное поле сами, но плохо делают повороты и не следят за ситуацией. При искажениях сигнала оставляют «петухов».
Мы сначала думали про GPS + видеоаналитику, но очень быстро выяснилось, что достаточно только видеоаналитики.
Сейчас комбайн умеет двигаться по плану в загонке, умеет распознавать препятствия и тормозить перед ними, умеет согласовывать движение с транспортом для зерна и другими машинами в клине.
GPS требует долгого программирования карты по навигационным точкам. Это сложный интерфейс, а сложные интерфейсы в поле не работают. Мы сделали куда проще: автопилот видит: «Ого, поле!» — и предлагает передать ему управление. Всё.
Оператор может следить за жаткой и особенностями культуры. Робот рулит.
Режимы:
По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.Кроме комбайна, ещё возможно установить ко-пилота на трактор, косилку или опрыскиватель.
Теперь вы примерно представляете, что нужно, чтобы к вам на стол попали хлеб, кукуруза, макароны, гречка и где там можно накосячить. Я пока на этом остановлюсь, потому что много лет работал в сельском хозяйстве с техникой, а не в разработке и не с нейросетями, но в следующем посте мой коллега из разработки расскажет, как именно всё это работает и в чём конкретно были сложности всё это сделать за два года. А они были, уж поверьте.
Общий экономический эффект — снижение себестоимости зерна на 2,5–5 %. Увы, это аналитика, а не АБ-тест (его сложно провести из-за того, что все участки разные, механизаторы — тоже, и это только второй год работы), но, если интересно, могу рассказать, как мы его рассчитывали.



