

Как опыт использования мобильных роботов на складах Amazon, Ocado и других подстегнул эволюцию транспортных систем для автономных интеллектуальных, масштабируемых фабрик?
Amazon имеет более 520 000 роботов и создала более миллиона рабочих мест по всему миру. Более десятка других типов роботизированных систем используются на предприятиях по всему миру, включая сортировочные центры и авиаузлы.
Мобильные роботы становятся все более популярным решением для автоматизированных складов и распределительных центров. Эти роботы способны ориентироваться в складской среде, что позволяет им выполнять такие задачи, как сбор и транспортировка товаров, пополнение запасов на полках и многое другое. Все мы видели видеоролики с сотнями одинаковых роботов, работающих на складах OCADO, Amazone и др. Они очень эффективны и успешны, что стимулирует разработку и запуск новых моделей, рост предложения и т.д.
Напротив, на традиционных сборочных фабриках, возможная область применения мобильных роботов изначально ограничена и очень неоднородна. С одной стороны, из-за широкого диапазона требований: работа внутри помещения и снаружи, огромное разнообразие массы и размеров, сложная распаковка, погрузка и т.д. С другой стороны, большая часть логистики на таком производстве осуществляется с помощью конвейерной ленты. Это делает мобильные решения сложными и дорогими, а значит, еще менее привлекательными для заводов - замкнутый круг. В результате мобильные роботы, очень перспективная технология с большим теоретическим потенциалом, стали нишевым продуктом. В итоге мы имеем на рынке множество мелких брендов с высокими ценами, разными API, программным обеспечением, требованиями к инфраструктуре и т.д. - "зоопарк". У технологии не много стимулов для развития и нет возможности внедрения в больших проектах.
Между этими двумя крайними случаями, традиционной фабрикой и складом, есть несколько ключевых различий:
На складе все объекты очень типизированы, с небольшими контролируемыми вариациями: упаковка, вес, размер и т.д.
Среда для перемещения очень ограничена - фактически это матрица.
На складе существует всего несколько простых типов логистических операций.
В связи с этим мобильные роботы стали основной транспортной системой в складском деле. Понимание сути фундаментальных причин успеха складских мобильных роботов и проблем таковых для сборочных фабрик помогло нам, команде Robofacturing в Arrival, разработать эффективную транспортную систему для нашей автономной, масштабируемой смарт фабрики.
Автономная, масштабируемая смарт-фабрика
В сравнении с роботизированным складом, современная сборочная фабрика это продукт с уникальным дизайном, уникальной высоко-связанной инфраструктурой, конвейерной лентой и слабой диджитализацией - hardware-driven. Чтобы избавиться от этой связанности и комплексности, мы разработали модульную архитектуру и новый тип фабрики, которая должна:
быть независимой от продукта и определятся типами соединений и материалы (как "3D-принтер")
иметь низкий порог входа (стоимость) - доступный для малого и среднего бизнеса
иметь значительно более короткое время выхода на рынок
быть легко масштабируемой в зависимости от спроса
легко обновляться новыми технологиями и решениями
управляться искусственным интеллектом
быть модульной и software-driven как Data center или Data Cloud
Такая фабрика представляет собой "конструктор", который собирается по шагам.

Шаг 1. Smart Cell
Ключевым блоком этой фабрики является Smart Cell с фиксированным, независящим от собираемого продукта, типовым оборудованием, чип-сетом, Cell OS и API для Plug-and-Play приложений (Applications) - как блейд-сервер в центре обработки данных. Мы перенесли все, что связано с уникальностью собираемых продуктов, в tooling (роботические захваты, оснастка, палеты и т.д.), которые перемещаются в/из Smart Cell и между ними. Затем упаковали каждый инструмент (tool) как application с интерфейсом Plug-and-Play и подключили все необходимые приложения к каждой ячейке Smart Cell - для завершения наших "блейд-серверов":

Шаг 2. Масштабирование Smart Cell и AMR
Smart Cells - это унифицированные программно-управляемые ячейки, которые могут выполнять различные типовые атомарные операции с помощью гибких приложений и искусственного интеллекта (AI App). Чтобы создать фабрику, мы масштабируем несколько Smart Cells в Grid, в зависимости от продуктов, которые нам нужно собрать (нагрузка для нашего "Data center") по принципу связи "многие ко многим" между ячейками. Теперь нам нужно добавить "шину данных", в нашем случае систему транспортировки деталей - autonomous mobile robots (AMR):
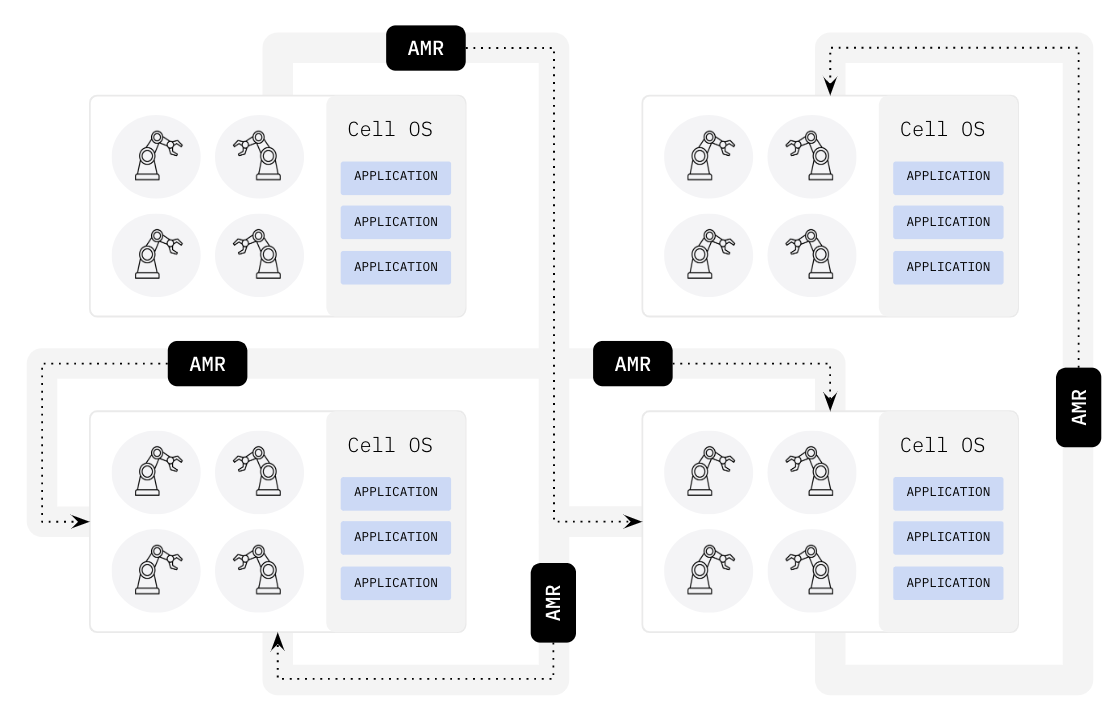
Как видите, заменив физический конвейер виртуальным, который можно перестраивать в режиме реального времени, и типизировав ячейки и операции, мы приблизили нашу заводскую среду к роботизированному складу, тем самым упростив ее для мобильных роботов. С другой стороны, теперь наши роботы должны быть способны действовать согласованно и независимо, работать на довольно высокой скорости (чтобы поддерживать время цикла фабрики), двигаться без заранее заданных траекторий и уметь уклоняться от различных типов препятствий, включая людей.
Шаг 3. Factory OS и Digital factory create
Для задача оркестрации наших AMR мы разработали Factory OS, которая управляет всеми ресурсами (Smart Cell, AMR и т.д.) и состоит из таких компонентов как: Autonomous execution engine - мультиагентная система на основе ИИ в реальном времени; специализированная и высоконагруженная платформа данных; активный планировщик, APL studio - IDE для создания всех правил фабрики, используемых автономным механизмом, и т.д.
Digital factory create это набор данных и программных инструментов (Digital twin, Application Hub, Playbook и др.), которые обеспечивают процессы проектирования, исполнения и изменения всех объектов автономной фабрики. Этот актив может создавать себя в цифровом виде и управлять внедрением/развертыванием самого себя.
Подробное описание Factory OS и Digital factory create это темы для отдельных статей.
Итак, мы изменили и упростили архитектуру фабрики, но повысили требование к нашей "шине данных" - интеллектуальность и автономность. К тому же, у нас осталась требование работы с различными диапазонами масс и размеров. Для решения этих проблем нам пришлось разработать собственную эко-систему мобильных роботов.
Шаг 4. RoboHive
RoboHive - это гибкая, модульная, реконфигурируемая и экономически эффективная экосистема автономных мобильных роботов, предназначенная для выполнения ряда производственных и логистических операций внутри и вне автономных интеллектуальных масштабируемых фабрик. RoboHive состоит из подключаемых активных и пассивных модулей, похожих на кирпичики "Лего"; все компоненты внутри роботов являются модулями (например, датчики, исполнительные механизмы и полезная нагрузка могут быть легко заменены); сами роботы являются совместными модулями, которые могут быть объединены для создания "кластерных" систем, которые могут выполнять сложные задачи в координации.

RoboHive это универсальная экосистема мобильных роботов, адаптируемая к различным вариантам использования и конфигурациям продуктов. Роботы в первую очередь предназначены для логистики внутри помещений (легкие/быстрые и тяжелые/ультрабезопасные) на заводах. Среди других вариантов использования - автоматизированный контроль (качества/площадки) и сервисное обслуживание собранных продуктов (например, автоматическая зарядка автомобилей, замена аккумуляторов и т.д.).
Помимо мобильных роботов (т.е. HiveBots), наша команда разработала двигатели роботов, контроллеры двигателей роботов, электронику и датчики роботов, а также ряд программных систем для управления роботами, ощущения и восприятия, моделирования и автономной навигации.
Компоненты RoboHive:
HiveBots - любая AMR-часть RoboHive (например, WeMo).
Core sofware - бортовые и наземные системы управления AMR
AMR-элементы - контроллеры, двигатели, актуаторы, система зарядки
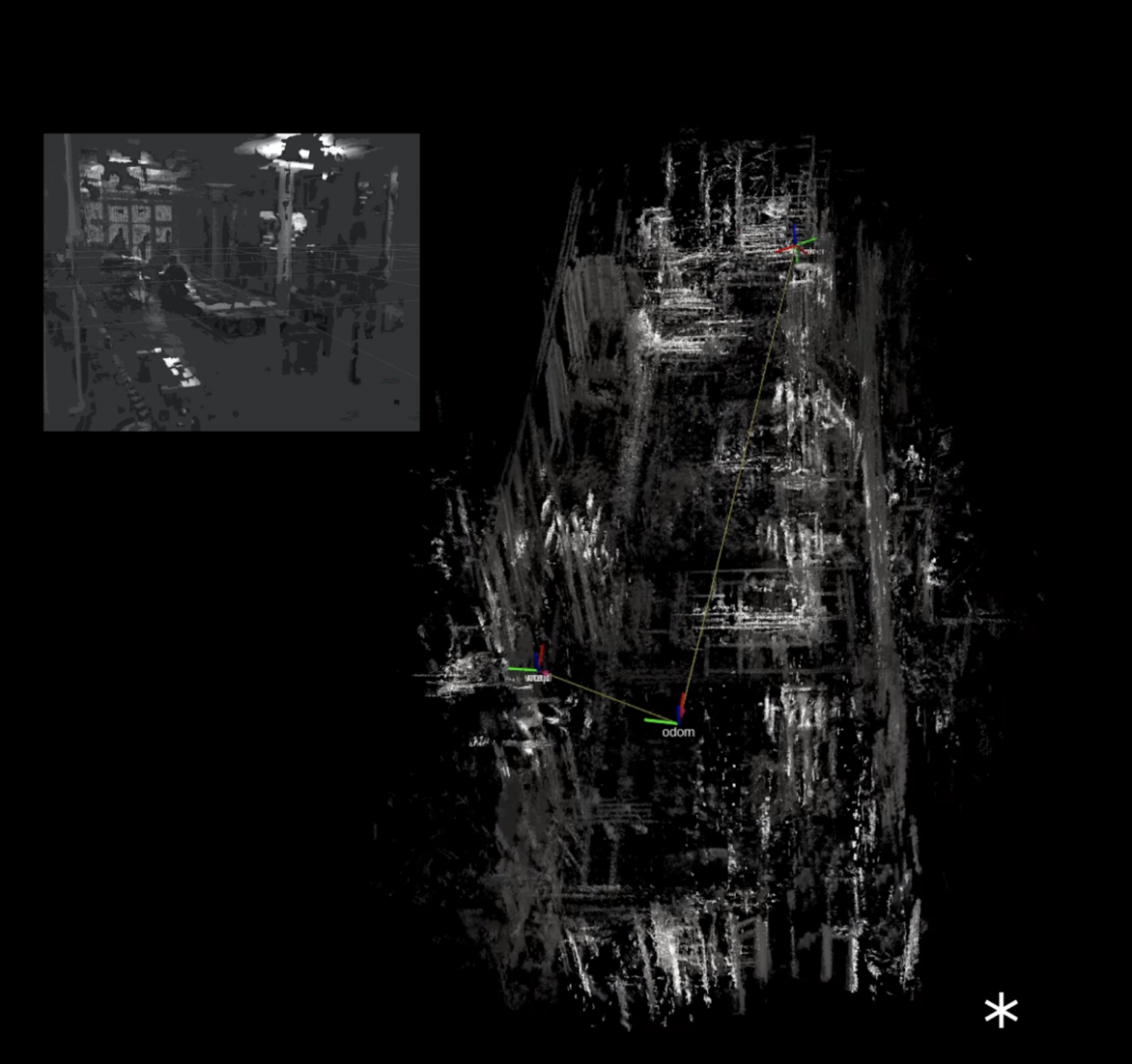
RoboSLAM - платформо-агностическая система навигации AMR на основе зрения и пространственного ИИ
Симуляторы и системы визуализации - симуляторы одного/многих роботов, диагностические инструменты, физические симуляторы, симуляторы флота/трафика
Контроллеры двигателей/движения - мультимодальные оценщики состояния, высокочастотные контроллеры двигателей, 3D системы планирования и управления движением
Инфраструктура: системы зарядки, сетевые системы, системы безопасности, средства разработки и диагностики, CI/CD
Шаг 5. WeMo - Wheeled Mobility
WeMo - это модульный автономный мобильный робот, предназначенный в первую очередь для решения всех логистических задач автономной смарт-фабрики. Это "рабочая лошадка" нашей "шины данных".

Exteroceptive sensors: измерение окружающей среды вокруг робота. Интероцептивные датчики: измерение внутренних условий робота.
Sofware стек включает в себя бортовое программное обеспечение, а также ПО для разработки и тестирования, включая симуляторы.
Всенаправленные колеса
Максимальная полезная нагрузка: 2 000 кг.
Максимальная скорость: 1 м/с (безопасная скорость 0,5 м/с для человека).
Точность позиционирования во время движения: 100 мм.
Точное позиционирование: <5 мм.


Ключевые особенности этой технологии:
Горизонтальная модульность в сочетании с вертикальной модульностью: роботы соединяются друг с другом для создания более крупных платформ (горизонтальная); роботы могут нести активную/пассивную полезную нагрузку по отдельности или в кластере (вертикальная).
AMR разработан для добавления активных модулей поверх него (роботизированная рука, модуль вилочного погрузчика, мобильная зарядная система и т.д.).
Данные и безопасные коммуникации объединены по безопасному беспроводному соединению: действительно уникальное решение на рынке. Это позволяет динамически добавлять и удалять AMR в сети безопасным способом.
Шаг 6. Cluster mode
Для решения проблемы переноса полезной нагрузки разных размеров и веса традиционные мобильные роботы должны состоять из роботов разных размеров и даже разных типов, учитывая, что большинство из них разрабатываются и производятся, ориентируясь на одну конкретную область задач, поскольку компании не могут позволить себе более широкий ассортимент моделей и не имеют достаточного спроса со стороны традиционных заводов, по причинам, упомянутым в начале статьи. Это приводит к проблемам и затратам, связанным с обслуживанием нескольких типов роботов (включая обучение персонала), увеличению времени и стоимости интеграции, более высокой стоимости технического обслуживания, низкой энергоэффективности и т.д.
WeMo разработан для совместной работы без физического соединения для создания транспортных платформ различных размеров (т.е. кластерный режим), адаптирующихся к динамическим потребностям фабрики (например, один робот для перемещения грузов весом до 2 тонн малого/среднего размера, несколько роботов, синхронизированных и соединенных программно для перемещения грузов тяжелее 2 тонн или больших по размеру).
Мы разработали специальное программное обеспечение и контроллеры для создания "роев" AMR различных размеров в режиме реального времени.


Кластерный режим экономит до $7,65 млн. для парка из 150 мобильных роботов (типичный размер для фабрики по сборке автомобилей с производительностью 10 тыс. в год).
Открытые вопросы
Мы запустили нашу первую автономный смарт-фабрику с парком из 100+ AMRs в предпроизводственном режиме в сентябре 2022 года в Бистере, Великобритания. Парк AMR успешно прошел все основные испытания и проверки и поддерживает производственный процесс на уровне 80% от целевой скорости, включая режим кластера.
Однако для достижения полностью автономных возможностей, повышения точности и экономической эффективности необходимо решить некоторые критические задачи:
Ровный пол - Обеспечение возможности развертывания фабрики на складах без сверхплоского пола.
Robo SLAM - программная навигационная система нового поколения для HiveBots. Она может сэкономить $350 тыс. на одной фабрике.
Поддержка 5G - Повышает безопасность и надежность инфраструктуры. Позволяет значительно увеличить объем трафика данных, что расширит возможности AMR по совершению сложных маневров и даст нам возможность использовать AMR для комплексных заводских роботизированных операций: проверки качества, EOL, измерений и т.д.

Заключение
Изменив и ослабив по отношению друг к другу основные ограничения - уменьшение сложности заводской среды с помощью концепции "Data center" и увеличение возможностей мобильных роботов путем создания продвинутой модульной эко-системы, мы создали эффективную транспортную систему, которая может быть почти такой же гибкой как шина данных:
Она не зависит от инфраструктуры и полностью автономна.
Наши AMR будут свободно перемещаться автономно без рассчитанных заранее траекторий. Это позволят быстро изменить конфигурацию всего производственного потока фабрики и быстро переключиться между различных продуктами без влияния на инфраструктуру фабрики, поскольку AMRs автоматически обрабатывают изменении логистики.
AMR могут перемещаться в разные места для доставки деталей и, если необходимо, перенаправляться из-за заторов и т.д. Таким образом, мы можем одновременно производить на одном заводе продукты с разным количеством и последовательностью операций.
AMR могут автономно подстраиваться под динамически меняющийся груз, размеры, вес и т.д.



