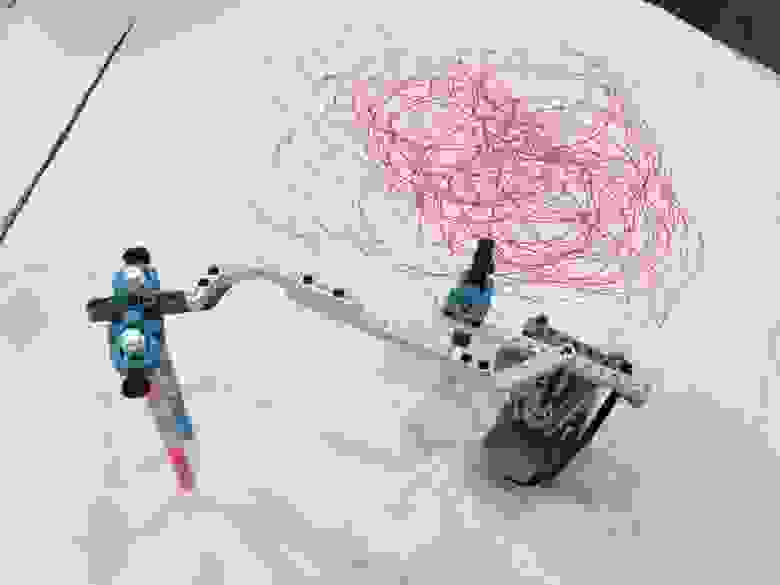
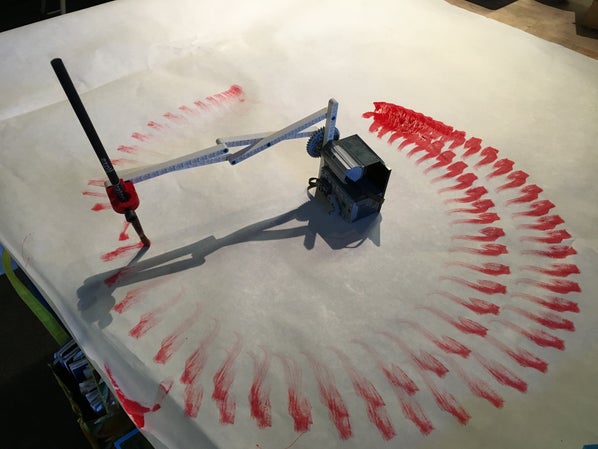
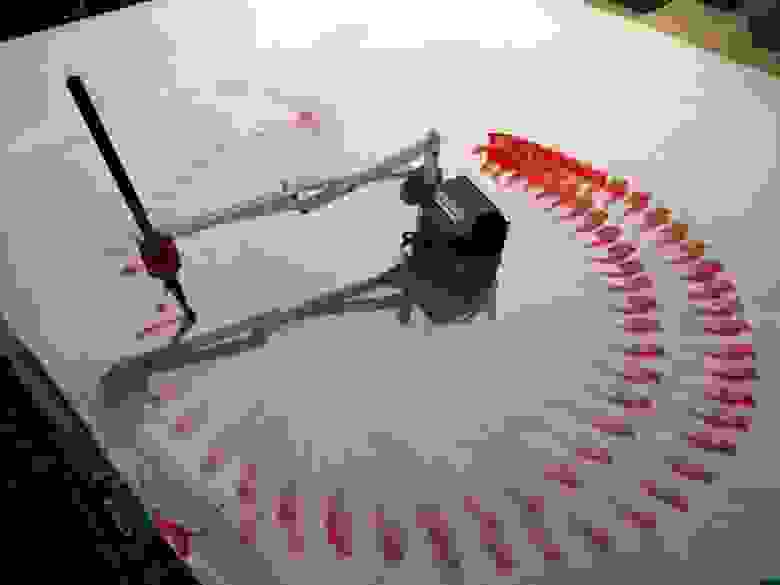
Мы, команда мастерской Tinkering Studio в «Эксплораториуме», считаем, что LEGO даёт много возможностей для изучения движений, механизмов и передач. Один из наших многократно проверенных опытов — прикрепление маркеров к деталям LEGO Technic для создания удивительных и поражающих воображение рисующих роботов, которые рисуют узоры в движении. С помощью набора деталей LEGO можно создавать бесконечные вариации и делать неожиданные открытия. Подробности — к старту флагманского курса по Data Science.


Инструкция включает перечень деталей LEGO, ссылку на файл для 3D-печати держателя для маркера, несколько идей о том, как начать работу, и вдохновение для совершенствования проектов.
Следуйте инструкции, но помните, что это лишь отправная точка для ваших творческих идей. Мы предлагаем вам попробовать разные механизмы движения роботов, поэкспериментировать с разными инструментами для рисования и создать собственный набор деталей LEGO. Мы продолжаем разрабатывать новые опыты с LEGO. Пожалуйста, поделитесь с нами своими идеями и конструкциями.
Шаг 1. 3D-печать держателя маркера

Для создания рисующего робота нам понадобится держатель маркера. Это позволит соединить маркер со стержнями LEGO Technic. В держателе будет 4 отверстия для стержней LEGO Technic, которыми мы прикрепим держатель к роботу.
Держатель напечатаем на принтере Ultimaker 2, но этот метод подходит и для других 3D-принтеров. Затем подготовим для держателя зажимной нейлоновый винт. С помощью метчика с размером резьбы 1/4"-20 (и патрона для метчика) проделаем ответную резьбу в отверстии для винта в верхней части круга. Нам понадобится нейлоновый винт (с резьбой 1/4"-20, длина 1/2", чёрный, с полной резьбой). Лучше всего иметь под рукой хотя бы 2–3 держателя маркера на одного робота. Это позволит экспериментировать с движениями робота.
Мы испробовали несколько вариантов этой детали. Если интересно, можете почитать о процессе её проектирования в блоге Tinkering Studio: http://tinkering.exploratorium.edu/2016/04/12/lego-pen-holder-evolution
Если у вас нет 3D-принтера, есть много других способов прикрепить маркер к роботу: малярной лентой, кабельными стяжками или эластичными резинками. Мы изготовили эту деталь более примитивным способом: приклеили прищепку к стержням LEGO Technic. В крайнем случае годится и такой вариант. Не бойтесь экспериментировать, прикрепляйте к деталям набора LEGO любые материалы.
Держатели
- Скачать LEGOTinkeringPenHolder-3.stl
Шаг 2. Набор деталей LEGO
Экспериментальным путём мы пришли к набору деталей, которые, как нам кажется, хорошо подходят для опытов с рисующими роботами из LEGO. Мы перечислили их на сайте Brick Owl, где продаются отдельные детали LEGO. Там вы сможете посмотреть предложенные детали в рекомендуемом нами количестве.
- Экспериментируем с LEGO. Рисующие роботы: набор деталей
Это полный набор деталей, который мы обычно используем в нашей мастерской в «Эксплораториуме». Возможно, для создания одного робота все они вам не потребуются, но под рукой всегда полезно иметь полный набор, который поможет вам изучить разные механизмы движения, связанные с вибрацией, механическими передачами и тягой. Из этого базового набора вы сможете построить много разных роботов, которые будут рисовать разными способами. Начните с того, что у вас уже есть под рукой, и посмотрите, что вы сможете создать!
Шаг 3. Маркеры и бумага
Чтобы начать строить прекрасных рисующих роботов, кроме набора LEGO, нам понадобятся маркеры и бумага для рисования.
Роботу нужно чем-то рисовать. Обычно мы используем длинные и тонкие маркеры crayola или более короткие — pipsqueak. Есть и другие варианты: кисти и акварели, угольные карандаши, восковые мелки и даже мел для рисования на асфальте (почему бы не выбраться вместе с роботом на улицу?).
В мастерской мы обычно покрываем весь стол плотной обёрточной бумагой, чтобы роботам было где прыгать, переворачиваться и крутиться по спирали. Мы разделили поверхность стола на секции стенками, однако перемещения роботов хорошо ограничивают и обычные гимнастические обручи.
Шаг 4. Базовые модули и отправные точки
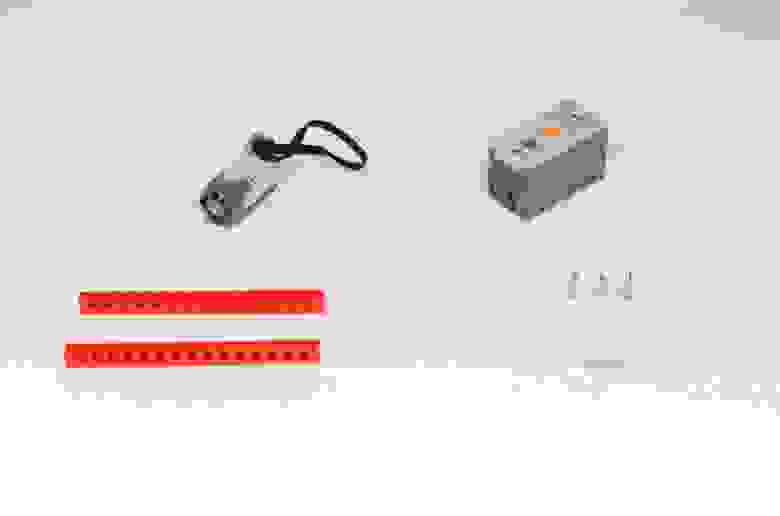





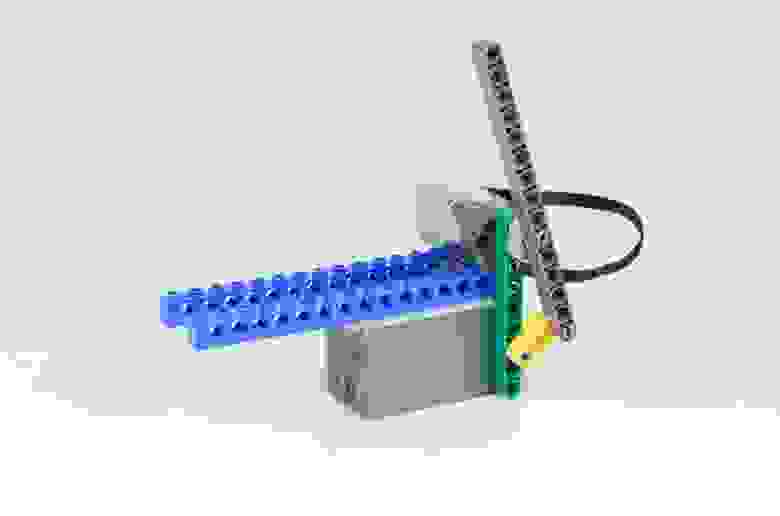


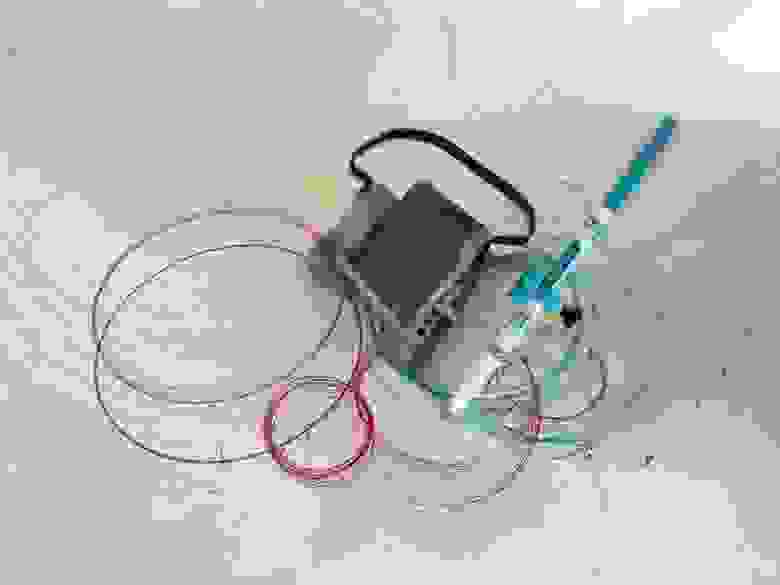
Теперь, когда у нас есть все необходимые материалы, мы готовы приступить к опыту с созданием рисующих роботов из LEGO! В процессе работы мы поняли, что мотор и батарейный блок удобнее собирать в единый блок. Поэтому сначала мы показываем «базовый модуль» и несколько видов движений, а потому уже переходим к прикреплению маркеров.
Мы испытали разные конструкции и остановились на одном простом варианте. Чтобы сделать базовый модуль, прикрепите 2 длинных «кирпичика» LEGO Technic с 15 отверстиями к боковым направляющим батарейного блока. Они не должны выступать за блок со стороны зелёной кнопки. Присоедините мотор и прикрепите его к «кирпичикам» на батарейном блоке. Присоедините «балку» с 9 отверстиями тремя серыми штифтами к мотору и «кирпичику», чтобы зафиксировать мотор.
Мы стараемся использовать в примерах разные виды движений: вибрацию от смещённого центра тяжести, механические передачи, качение по полу. Каждая из этих отправных точек может вдохновить учеников на развитие, объединение, повторение и усложнение идей, чтобы каждый из них нашёл свой путь в робототехнике.
Шаг 5. Создание среды для экспериментов


Если вы планируете проводить занятие с учениками в школе, библиотеке или хакерспейсе, вот несколько полезных советов, которые пригодились в работе с рисующими роботами.
Изогнутые столы создают совместное рабочее пространство, позволяющее людям делиться своими идеями, перенимать чужие и учиться друг у друга. Коллективное обучение увлекает участников и открывает множество новых задач и решений.
Детали LEGO малы и часто похожи друг на друга. Поэтому мы уделяем много внимания их размещению на столе. Чтобы рассортировать детали по категориям, мы часто используем металлические подносы для столовых или контейнеры для еды. Доступность деталей заметно облегчает эксперименты с повторяющимися итерациями.
Наконец, мы выделили зону для совместного тестирования, где каждый, кто закончил сборку и доволен результатом, может испытать своего робота в деле. Рисующие роботы создают прекрасные узоры. Поэтому стоит подумать и о демонстрации их работ в учебном пространстве, чтобы ученики могли получить представление о выполненных проектах и вдохновиться идеями.
Шаг 6. Развитие идеи


Постройка рисующих роботов может вылиться в множество разнообразных опытов. Можно экспериментировать с масляными красками, восковыми мелками и мелом. А можно прикрепить к роботам светодиоды, делать снимки с длинной выдержкой и наблюдать траектории движения света во времени.
Также можно постараться сделать процесс тестирования более научным и наблюдать за каждой итерацией работы роботов. Создание диаграмм и графиков помогает отслеживать, как сильно небольшие изменения конструкции меняют движение рисующих роботов. Система LEGO WeDo позволяет программировать роботов. Это может быть интересно при создании более точных моделей.
Мы изучаем и другие способы работы с LEGO. Посмотрите другую инструкцию, посвящённую звуковым роботам LEGO, и создайте своего механического музыкального робота! Расскажите нам о своих экспериментах и следите за новыми идеями на сайте Tinkering Studio.
О студии: Tinkering Studio — это место захватывающего, активного и творческого времяпровождения в музее участия «Эксплораториум», где посетители могут сбавить шаг, погрузиться в исследование научных явлений и создать что-то своими руками… подробнее о tinkeringstudio
А мы поможем разобраться с SQL, чтобы вы прокачали карьеру или стали востребованным IT-специалистом:
- Профессия Data Analyst (12 месяцев)
- Профессия Data Scientist (24 месяца)
Чтобы посмотреть все курсы, кликните по баннеру:

Data Science и Machine Learning
- Профессия Data Scientist
- Профессия Data Analyst
- Курс «Математика для Data Science»
- Курс «Математика и Machine Learning для Data Science»
- Курс по Data Engineering
- Курс «Machine Learning и Deep Learning»
- Курс по Machine Learning
Python,
- Профессия
Fullstack-разработчик на Python - Курс «Python для
веб-разработки » - Профессия
Frontend-разработчик - Профессия
Веб-разработчик
Мобильная разработка
- Профессия
iOS-разработчик - Профессия
Android-разработчик
Java и C#
- Профессия
Java-разработчик - Профессия
QA-инженер на JAVA - Профессия C#-разработчик
- Профессия Разработчик игр на Unity
От основ — в глубину
- Курс «Алгоритмы и структуры данных»
- Профессия
C++ разработчик - Профессия «Белый хакер»
А также
- Курс по DevOps
- Все курсы




