
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!
Насмотревшись роликов на Youtube и на своих детей, пускающих слюни, на арендуемые гироскутеры решил попробовать свои силы в самостоятельной сборке данного устройства. Рассуждая о целесообразности сделать самому или купить, убедил себя, что это игрушка, причем сезонная, причем для моих детей погодок одним устройством не обойтись. Также в самоубеждении сыграл роль опыт сборки домашнего ЧПУшного станка, ну и собственно популярность самого тренда гироскутеров и вау эффект на окружающих меня обывателей.
Опыт сборки гироскутера собственными силами
Приступая к работе, решил сначала опробовать концепцию и определиться с необходимой мощность электромеханических узлов, чтобы обосновать дальнейшие вложения в комплектующие.
Первая версия (сигвэй)
С механической точки зрения вариант сигвэя казался более простым (отсутствует нагруженный средний поворотный узел), кроме того все, что нашел на youtube это самоделки именно сигвэев.
Не смотря на то, что имею достаточный опыт в программировании и работе с контроллерами решил софт самостоятельно не писать, а найти наиболее готовые решения. Кроме того, я редко могу поддержать свою мотивацию более одного месяца, а отладка работы софта с электромеханическими узлами редко заканчивается абсолютной победой, чаще компромиссом, и мысль о том, что совершенство не достигнуто меня бы червоточила.
В итоге выбор пал на работу Ovaltine’s Segway Clone (исходники есть на GitHub). Данный проект мне показался наиболее зрелым и поддерживающим железо, которое у меня есть (Arduino, MPU-6050, драйвера моторов с 2-мя и 3-мя управляющими сигналами на канал). Проект исчерпывающе прокомментирован, что позволяет не углубляться в анализ нюансов и как результат не догадываться о недочетах.
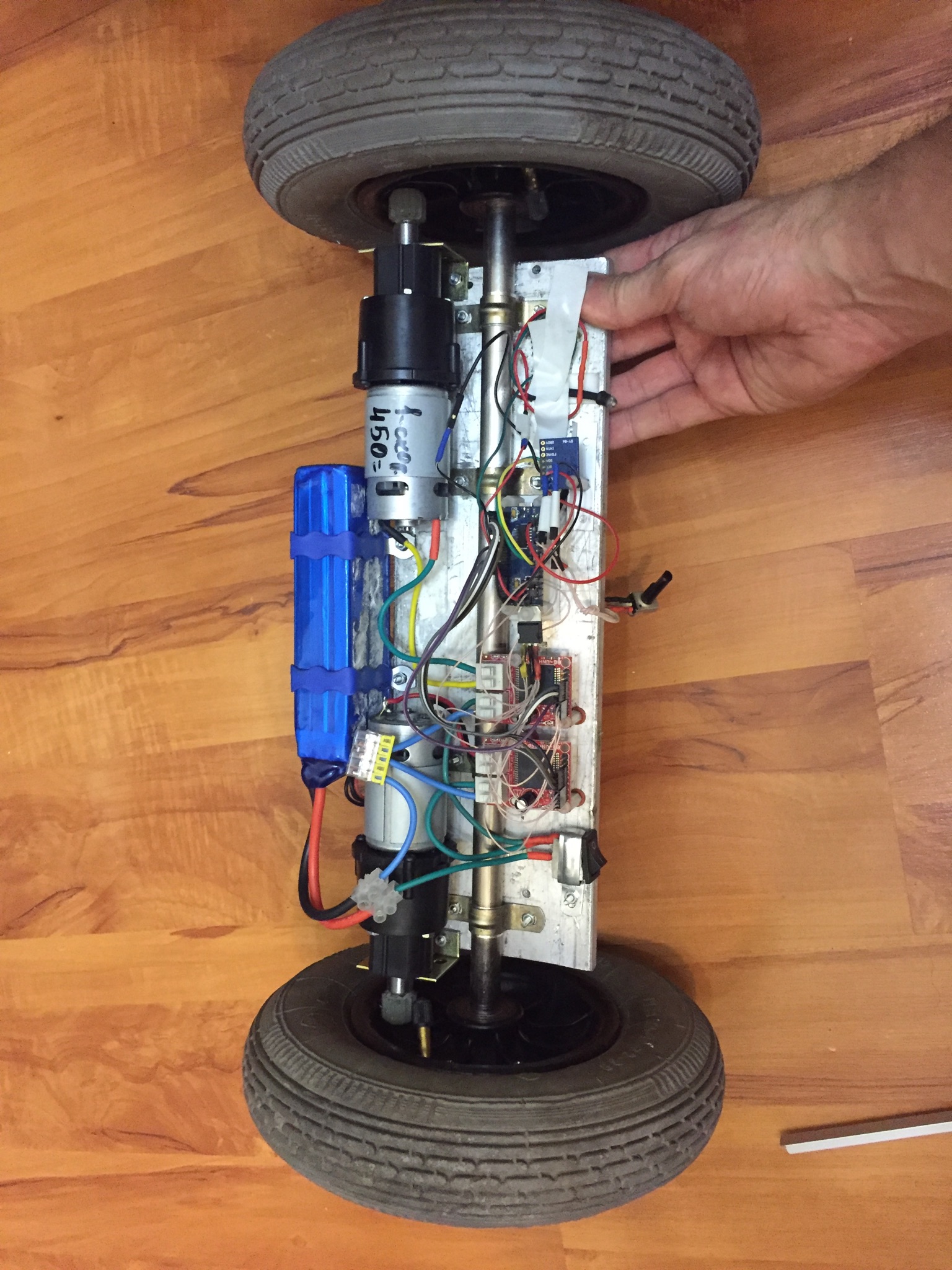
Недолго оттягивая, была сляпана платформа для испытаний:
Алюминиевая пластина толщина 12мм
Ось диаметром 14мм – направляющая от матричного принтера
Скобы строительные диаметр 14мм
Колеса – передние от инвалидной коляски (диаметр 8 дюймов, подшипники встроены).
Моторы и планетарные редукторы от шуруповертов на 18В
Шестерни передачи на колеса от электромясорубок
Аккумулятор 12В 5Ач Li-pol (остался после спада тренда квадракоптеростроения)
Драйвера vhn3sp30
Arduino Nano
Датчик 10DOF MPU-6050 (остались после спада тренда квадракоптеростроения)
Уголки, болты и гайки
По доступности можно отметить, что п.1,3,4,5,6,11 были куплены на местном рынке.
Отдельно следует отметить, что моторы с редукторами мне продали, разобрав на моих изумленных глазах, рабочий шуруповерт (450р мотор, 500р редуктор с ограничителем момента). На мой вопрос это окупается? Мне продавец ответил, что половину закупочной цены данного шуруповерта уже отбил на продаже аккумулятора.
Были затруднения с приобретением драйверов моторов (до 30А). Был заказан двухканальный драйвер vnh2SP30 на eBay за 600р, но так как ждать не хотелось, уже через неделю были куплены два одноканальных драйвера vnh3SP30 в «Чип и Дип» в разных городах (Краснодар, Волгоград) благодаря поездке на море.
После прошивки и калибровки гироскопа все заработало практически без проблем. Пришлось перекинуть на одном драйвере сигналы управления, потому что колесо крутилось в ненужную сторону, и выяснилось, что шестерни на валах редукторов проскальзывают не смотря на клей.
С шестерней вопрос решил следующим образом: гравером с отрезным диском нанес насечки продольно оси вала глубиной 0,5мм и длинной равной ширине одеваемой шестерни. Надел шестерню и забил в насечки обрезки скрепки (типа микрошпонки). Следом проявилось новое слабое место – недостаточное прижимное усилие шестерни редуктора к шестерне колеса. Зная, что это всего лишь промежуточный прототип не стал решать проблему фундаментально, а просто стянул кабельной стяжкой оси колеса и вала редуктора. После 20 минут покатушек капроновая стяжка не нагрелась хотя вал редуктора в отличие от вала колеса подвижный.
Следует отметить, что передача «вал редуктора – колесо» имеет высокие требования к выдерживаемому моменту. Передаточное число здесь составило всего 5:1. Планетарный редуктор шуруповерта имел число 1:25. При напряжении 12В скорость передвижения на 8 дюймовом колесе была безопасной (от 5-8км/ч). Также остался запас по напряжению.
Важно! Драйверы vnh2 до 14В.
Управление поворотами было сделано вынесением потенциометра в руку.
В результате потраченных усилий, денег и времени было проверена работоспособность и достаточность мощности всего устройства и обоснованы дальнейшие вложения указанных ресурсов. Конечно, можно было бы, и рассчитать все заранее, исходя из требуемого момента на колесе, но разброс реальных параметров двигателей от шуруповертов и малый выбор среди тех продавцов, кто разберет для тебя два конкретных шуруповерта, делает это бессмысленным.
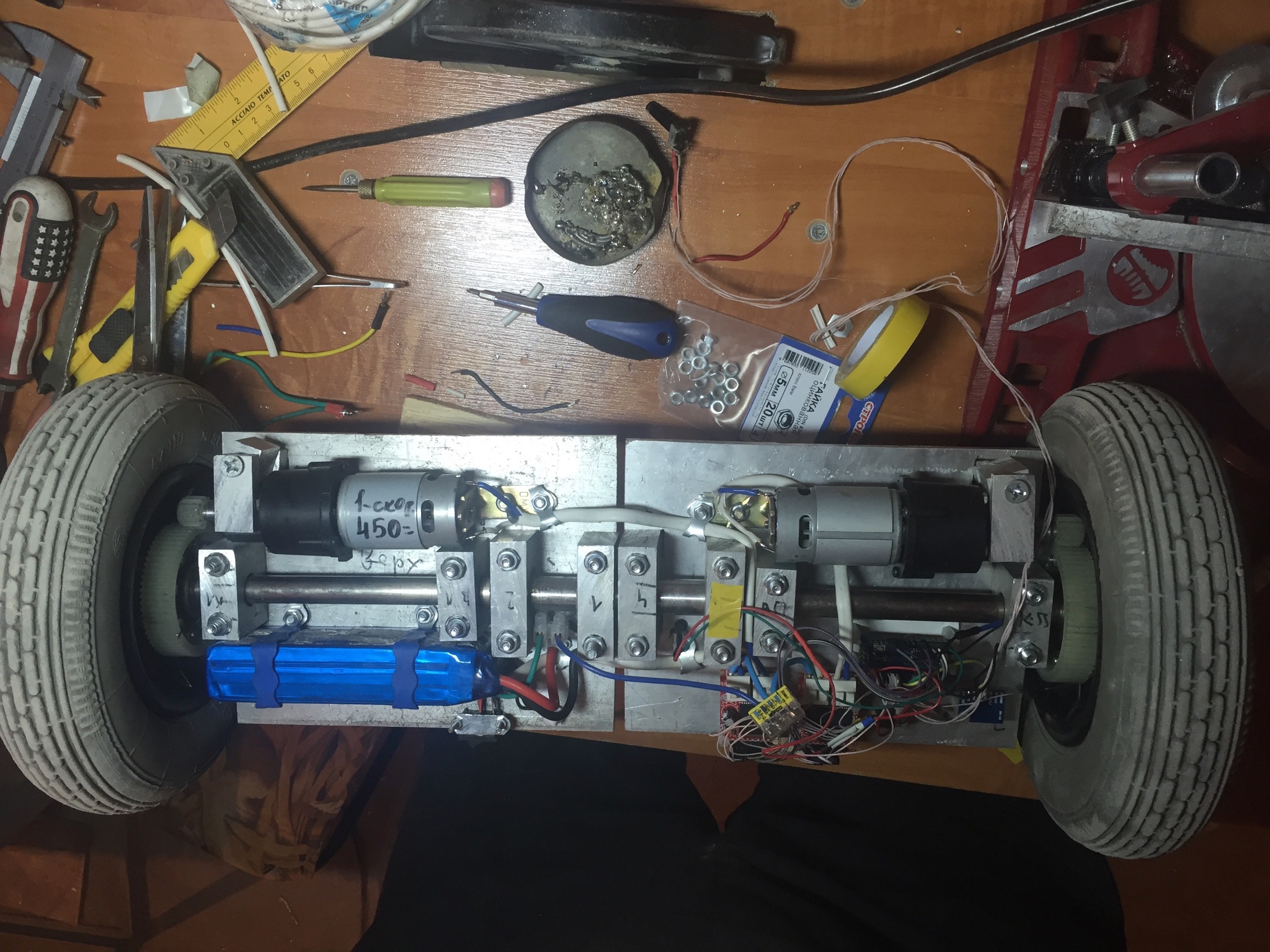
Вторая версия (гироскутер)
Усложнение конструкции до гироскутера неизбежно ведет к добавлению силовых узлов, привносящих вес, чего хотелось избежать, чтобы «не таскать велосипед на себе». Анализ весов комплектующих привел к выводу, что уменьшить вес можно только несущей пластины. И действительно пластина алюминия в 6мм (взамен 12мм) оказалась в полной мере удовлетворяющей ощущениям твердой основы под ногами (вес нагрузки около 80кг).
В связи с необходимостью установки подшипника в средний узел соосно с колесами потребовалось поднять ось колес от платформы, что в купе с разделением полуосей приводит к возникновению крутящих моментов на полуоси (излом). Пришлось отказаться от слабых скоб, которые начали подымать лапки вверх.
Анализ доступных подшипников с наименьшей высотой привел к выбору игольчатых подшипников (цилиндрических с внутренним диаметром 17мм и внешним 23мм). Здесь стало ясно, что ось среднего узла будет по диаметру больше чем полуоси колес. Мне не посчастливилось найти ось точно под подшипник. Пришлось обратиться к токарю с целью проточить строительный болт до нужного диаметра и сделать проточки для стопорных колец (вместо колец, впоследствии, была использована вязальная проволока для арматуры). Стопорные кольца понадобились, т.к. у данного подшипника отсутствует внутренняя оправа и цилиндры катаются по поверхности оси (т.е. он не напрессовывается).
Далее осталось только придумать узлы крепления, обеспечивающие соосность трех осей (две полуоси колес и толстая ось среднего узла). Это требование необходимо выполнить, чтобы не было неприятного ощущения на стопах, что их поворачивают туда, куда не требуется.
Решение пришло само: зачем искать специфичные крепления, если можно сделать их самому. Была куплена пластина алюминия толщиной 16 мм, порезана торцовочной пилой (диском с отрицательным углом) на одинаковые прямоугольники и которые были просверлены ступенчатым сверлом до нужных диаметров. Требования к точности сверления высокие только для двух оправ с подшипниками. Остальные (6 шт.) могут иметь разумные допуски, тем более, что фиксация неподвижных осей в оправах выполняется расклиниванием оправ.
Силовые провода были взяты из гибкого провода для проводки 2х2,5мм. Часть проводки удалось выполнить без пайки на пружинных и винтовых клеммах, но полностью от пайки отказаться не удалось.
Угол разбега полуплатформ было решено определять потенциометром с применение механизма тяги. Подвижная средняя ось и ось потенциометра были сориентированы параллельно. В подвижную среднюю ось был вкручен тонкий винт с головкой типа «ушка иглы». Вылет винта использовался как рычаг. На потенциометр была одета ручка-крутилка также с удлиненным винтом с ушком. Ушки винтов были связаны подвижной тягой из проволоки.

Очередное испытание показало, что одна полуплатформа оснащенная гироскопом, а вторая связана с первой через потенциометр дают ассиметричную реакцию при повороте вправо и в лево. Грубо прикинув в уме, это стало вполне объяснимо. К примеру,
Поворот направо (Левая наклонена \; Правая ровно __)
Угол левой платформы с гироскопом +5 значит скорость на колесах: Л=5 П=5. Угол правой платформы с потенциометром -5 от первой (т.е. нога горизонтально ожидается поворот направо) скорость на колеса Л=5-(-5)=10; П=5+(-5)=0. Итог - поворот вокруг правого колеса.
Поворот налево (Левая __; Правая )
Угол левой платформы с гироскопом 0 (горизонатльно) значит скорость на колесах: Л=0 П=0. Угол правой платформы с потенциометром +5 от первой (ожидается поворот налево) скорость на колеса Л=0+(-5)=-5; П=5-(-5)=5. Итог – поворот на месте вокруг себя.
Версия три (два контроллера)
Не долго думая и оставаясь верным концепции не разбираться с ПО, было решено на каждую полуплатформу поставить свой гироскоп и контроллер (благо этого добра у меня осталось достаточно).
Таким образом, каждый Arduino реально управляет только одним колесом по показаниям своего гироскопа. Потенциометры заменились в ПО обнулением переменной после нормирования результатов вызова analogRead (с контакта потенциометра), т.к. руль больше не нужен.
Также потребовалось немного упокоить ПИД регулятор уменьшением Кп.
Более адекватная версия испытывалась дольше, принося неописуемую радость детям, и выявила рецидивы в креплении шестерни к валу редуктора. Пришлось отказаться от «микрошпонок» и просверлить насквозь капроновую шестерню (в нерабочей области) и вал для установки штифта. После недели активного использования за такое решение жалеть не пришлось.
Данная версия работает наиболее адекватно, но включение активности, которое происходит после выравнивания полуплатформ (захват горизонта после 3 секунд), происходит независимо. Т.е. если первая полуплатформа после включения была выравнена раньше, то и активизируется балансер раньше. Это практически не заметно, но вытекает логически из ПО.

По результатам испытания функциональности на детях было решено одеть это все в корпус, что бы скрыть от непосвященных пользователей секреты электромеханической магии.
Лучше всего для корпуса подошел плоский ПВХ (204мм) воздуховод. Белый цвет выглядел не кошерно, в итоге транспортное средство было обклеено пленкой черного цвета под углеволокно. Вес всего устройства, благодаря пластиковым ободам колес, составил около 5 кг. В таком виде и было передано в пользование.
Фотки с корпусом, к сожалению, не осталось.
Собственные наблюдения, не стоит гнаться за скоростью реакции следования гиро за отклонением тела. Для человека это не свойственно, он сам регулирует равновесие. Чем медленнее реакция гиро (разгон 1,5-3 сек до максимальной скорости - оптимально) тем комфортнее наезднику. Для хорошей работы регулятору важнее не столько вес, а сколько рост пассажира (по сути это перевернутый маятник). Для моей конфигурации дети оказались по разные стороны критической границы роста - 135см…125см.
Принципиальное различие с промышленными гиро – это шум моторов и редукторов. Этот вопрос еще буду изучать, но учитывая, что все создано вокруг «планетарок» шуруповертов перспектива не светлая.
Статья написана 5 лет назад. Теперь уже гироскутерами никого не удивишь.
Вот что осталось на текущий момент от поделки...
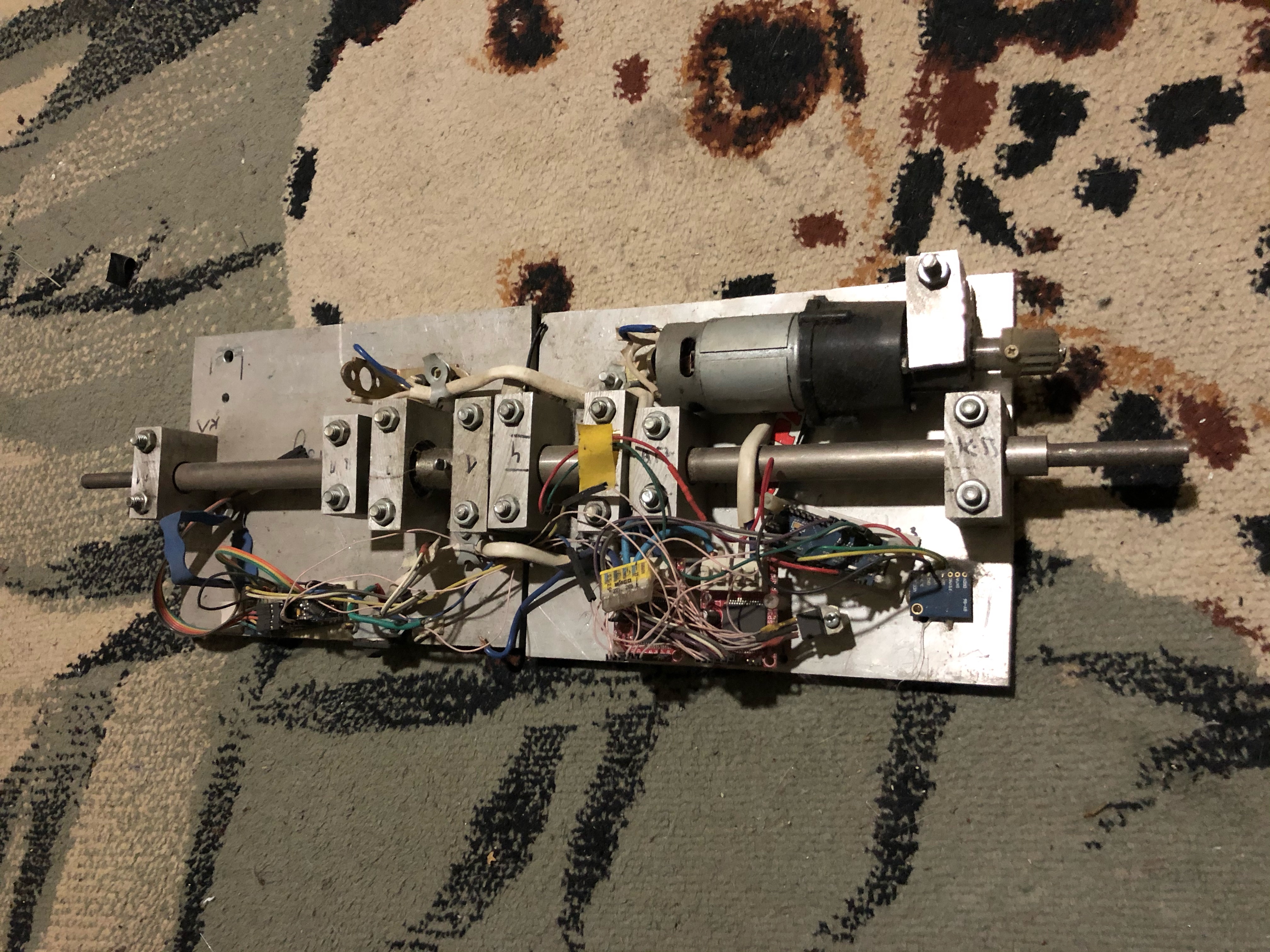
... и бесценный опыт мотивации "встать с дивана"!
На этом всё. Всем добра!



