
Прежде чем перейти к статье, хочу вам представить, экономическую онлайн игру Brave Knights, в которой вы можете играть и зарабатывать. Регистируйтесь, играйте и зарабатывайте!
С интересом слежу за темой симуляции живого посредством компьютерных программ. Нейросети демонстрируют огромный прогресс переваривая гигабайты информации.
Обучение нейронных сетей, в части требуемых ресурсов, далеко ушло от среднего по мощности настольного компьютера. Поэтому всегда интересны "игрушечные" проекты с быстрой обратной связью в части обучения нейросетей. А лучше всего, чтобы нейросеть сама и обучалась без заметных усилий со стороны разработчика. Этой весной был приятно удивлен обнаружив статью Job Talle о нейроэволюции кальмаров.
Относительно небольшая статья содержала как описание физических принципов движения кальмаров, так и описание невиданной мной в работе спайковой нейронной сети, приводящей щупальца кальмаров в движение и поверх этого генетический алгоритм для естественного отбора наиболее приспособленных особей. О чем статья, скорее о том как подковал блоху.
Начнем с источников:
Оригинальная статья взятая за основу при программировании кальмаров(осьминогов)

Перевод вышеуказанной статью на Хабре.
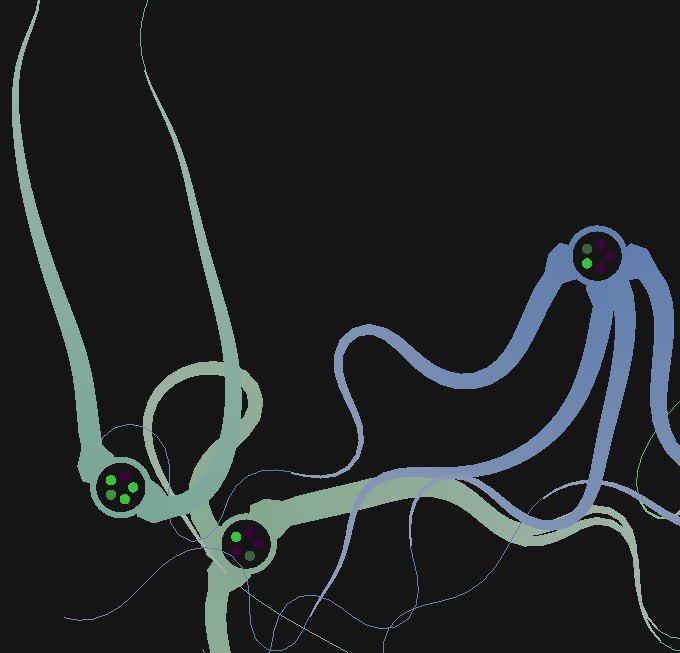
Если читатель пройдет по ссылкам, то обнаружит подробный рассказ(и его перевод) о реализации нейроэволюции на примере кальмаров. Результат статьи будет выглядеть так:

или так:

В статье приводятся исходный код и ссылка на симуляция выполняемую в браузере.
Когда все уже готово, рассказано и показано, остается вопрос, а как эта программа работает на самом деле.
Поэтому решил переписать код изначально созданный под JavaScript на более близкий мне с++. Как всегда бывает с чужим кодом, сначала многое было непонятно. Чего стоит такой вот пассаж:


простыми словами автор программы включил в индекс нейрона и его тип, зачем этот прием из 80-х годов непонятно. Вроде сейчас памяти хватает в компьютерах.
Но в целом прототип заработал и стал выглядеть примерно так:
Щупальца удлинил относительно оригинальных вариантов, показалось более гармонично.
Но картинка выглядела слишком схематично.
Решил добавить для гладкости сплайны по точкам щупалец и сдвиг точек сплайна от центральной линии щупальца в зависимости от расстояния от тела кальмара.

выглядит неплохо, но переход щупальца к телу хотелось увидеть более естественным, добавил более сильный отступ от центра щупальца:
в итоге остановился на таком варианте:
Но кальмары скорее всего не прозрачные, поэтому картинка больше про медуз:

Решено было закрасить щупальца, что требовало разбить их на отдельные треугольники и красить уже набор треугольников. В центре разместил активность нейронов.
или в движении:

и более мультипликационно:

Дело сделано в 2D, но 3D все еще мейнстрим, поэтому переходим к следующему этапу. Сначала понять как буду крепить щупальца:
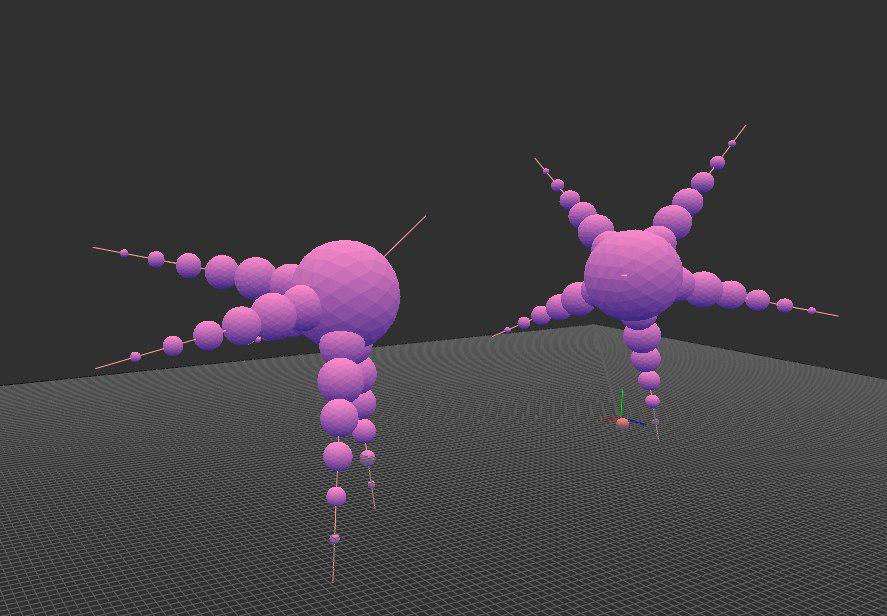
Решил сначала физику переписать с нуля:


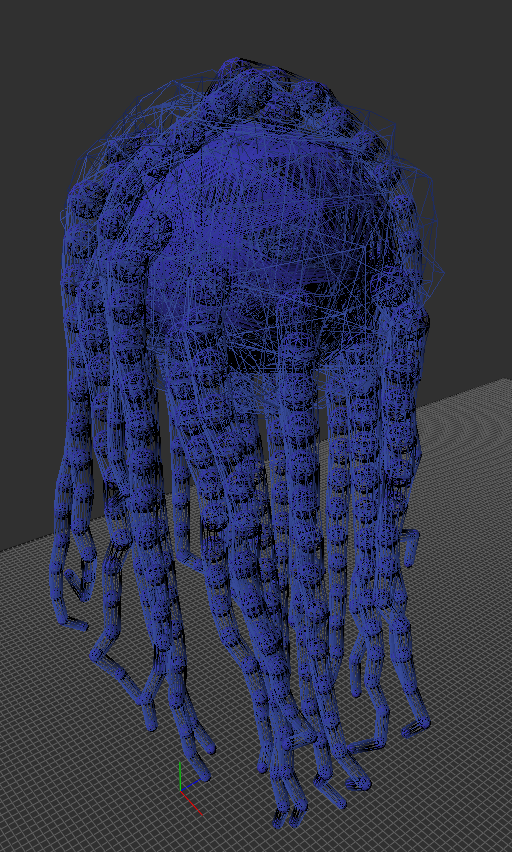
Видно, что опирается на щупальца, добавил коллизии щупалец и прочее из набора физического движка. Потянуло на проверенный временем Bullet Physics Library:
Но вскоре решил не трогать то, что работало изначально и просто добавил еще одно измерение в первоначальную физику:
получилось похоже на оригинал но в 3D. На видео видно баг, когда одна из щупалец ломается. Дело в том, что в 3D поиск нормали к вектору не совсем тривиальная задача. Местами симуляция движения щупальца ошибалась в выборе нормали. Поправил.
Конечный результат, что-то из фильма "Матрица":

Судя по первым комментариям, есть непонимание в части "анимации" движения щупалец. Щупальца приводятся в движение сигналами от конечных(выходных) нейронов, количество которых равно количеству щупалец у кальмара. Смещение начального сегмента щупальца зависимости от величины и знака сигнала(положительный или отрицательный) на выходном нейроне. Сенсоры сейчас особо не развиты и поэтому эволюция больше идет в части скорости движения кальмара.Больше скорость, больше еды собирает. В оригинальной программе на вход нейрона автор вообще ничего не подает. Готов рассмотреть предложения: какие сенсоры разместить на 3D варианте? думаю материала наберется для целой статьи.



