Друзья, всем привет. В данной статье я поведаю о том, как студент может спроектировать и изготовить устройство для проверки аэрометрических приборов. Да, да, речь пойдёт о дипломном проекте, сданном мной в далёком 2010.
В понятие «авиационные приборы» включают различные группы приборов, важнейшими из которых являются пилотажно-навигационные, а также приборы контроля работы силовой установки и других систем самолета. Пилотажно-навигационные приборы, в свою очередь, включают в себя аэрометрические приборы, пилотажные гироскопические приборы, навигационные устройства и системы. В процессе своего развития и совершенствования курсовые и навигационные системы выделились в отдельный класс авиационных приборов и измерительных систем. Показания аэрометрических, пилотажных гироскопических приборов, приборов контроля работы силовых установок непосредственно влияют на безопасность полетов. К ним предъявляются особые требования по надежности выдачи информации в аварийных условиях.
Механические аэрометрические приборы являются полностью автономными, так как для их работы не требуется дополнительного питания, именно для определения погрешностей измерения таких приборов и был спроектирован и изготовлен тестер аэрометрических приборов.
Назначение тестера
Цифровой тестер предназначен для проверки следующих аэрометрических приборов:
· баровысотомеров;
· указателей приборной скорости;
· указателей числа Маха;
· вариометров.
Немного о датчиках
Приборы, предназначенные для измерения давления называются манометрами. По назначению авиационные манометры делят на манометры, измеряющие абсолютное давление, разность давлений (дифференциальные) и отношение двух давлений.
Дифференциальные манометры – прибор для измерения перепада давлений. Применяется также для измерения уровня жидкостей или их расхода.
Манометры абсолютного давления (моновакууметры) (от греческого слова manos — редкий, неплотный, разрежённый) — прибор, измеряющий давление жидкости или газа, применяются для измерения давления во всасывающих системах.
Манометры отношения давлений служат для контроля степени сжатия газов в различных ступенях газотурбинных двигателей и др.
На рынке встречается много различных датчиков давления с различными характеристиками. Мой выбор пал на пьезорезонансные датчики производства Freescale. Датчики будут использоваться двух типов: для измерения абсолютного давления (двух диапазонов для вакуума и избыточного давления) и датчик для измерения дифференциального давления (разность).

Разрешающая способность полупроводниковых датчиков давления не отмечена в спецификациях фирм-производителей (Motorola, Honeywell). Считается, что ограничение на разрешающую способность накладывается только электроникой.
Структурная схема

На специальное программное обеспечение через плату сопряжения с датчиков давлени поступает информация как было бы ни странно, но о давлении, шок ! Программа пересчитывает это давление в зависимости от целоевого давления и формирует управляющий сигнал для открытия или закрытия клапана. Цикл повторяется.
Функциональная схема
На функциональной схеме показаны основные блоки и взаимосвязи между ними.
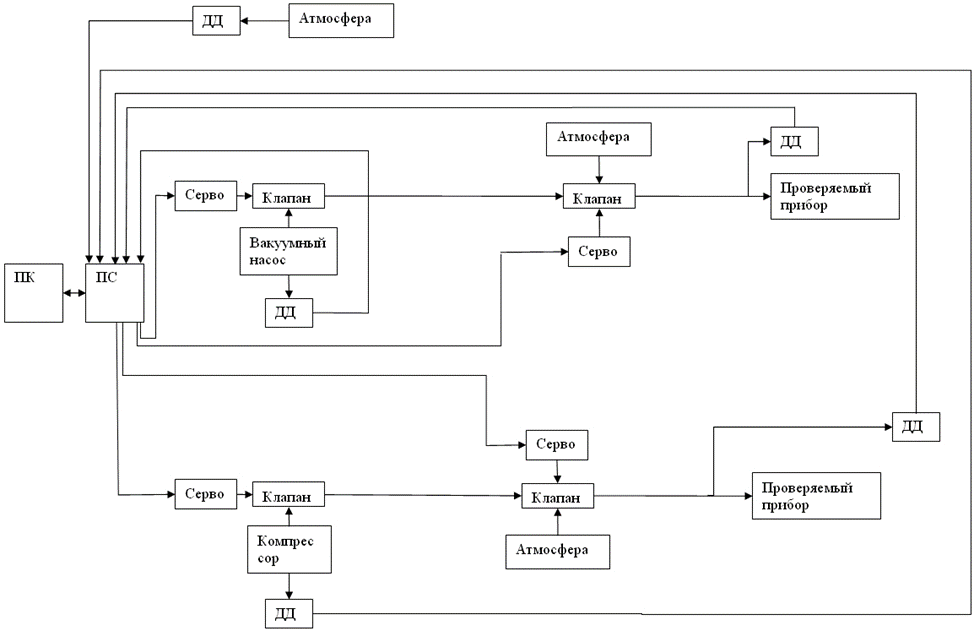
Плата сопряжения
Плата сопряжения служит для приёма данных с датчиков давления, отправки управляющих сигналов на сервоприводы, а также обеспечивает двустороннюю связь с ПК.
Выход с датчиков – аналоговый сигнал 0-5В, следовательно, сначала его необходимо «оцифровать». Для этого нужен аналогово – цифровой преобразователь (АЦП). В данной плате АЦП реализован программно на базе 10-ти битного микроконтроллера PIC16F873A. Помимо приёма данных с датчиков микроконтроллер передаёт оцифрованный сигнал на ADM232. Все манипуляции с платой сопряжения помог мне мой друг.
Текст прошивки для PIC16F873A, принимающей данные с датчиков и её толкование:
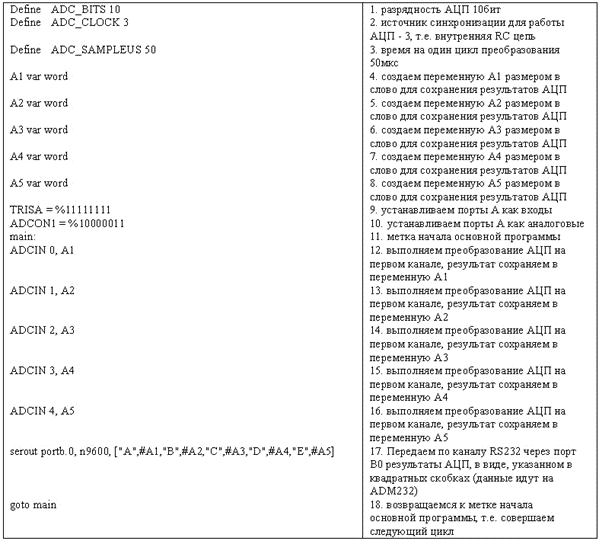
Сервопривод управляется импульсами с периодом 20 мс и длительностью от 0,8 до 2,2 мс (два крайних положения). Помимо управления сервоприводами микроконтроллер принимает данный с СОМ-порта через микросхему ADM232.

Длительность импульса определяется минимально возможной длительностью для данной частоты генератора (в нашем случае при частоте 4 МГц это 10 мкс).
Обе прошивки пишутся в программе Pic Basic. После написания они компилируются, создаётся так называемый HEX-файл. Он есть ничто иное, как прошивка в шестнадцатеричном коде.
После этого микроконтроллер устанавливается в кроватку программатора (если нет специального вывода на плате), программатор подключается к COM-порту ПК. Запускаем программу IC-PROG, в ней открываем созданный HEX-файл, выбираем типа контроллера и нажимаем «программировать микросхему». Спустя 30-50 сек запись программы закончится.



Плата датчиков давления
Датчики давления можно было бы закрепить и на плате сопряжения, но в таком случае плата стала бы сложнее, возник бы вопрос с размещением платы и поиском ошибок. Опыта же нет) Поэтому, для датчиков создана своя отдельная плата, которая подключается к плате сопряжения посредством шлейфа. Схемы подключения датчиков надо брать из Datasheet по конкретному датчику.


Распределитель давлений и общая компоновка
В основе распределителя давлений лежат стандартные воздушные (аквариумные) краны и рулевые машинки марки Hitec HS-311. Распределитель выполнен на жёсткой плате, на которой закреплено 6 рулевых машинок и колодка, в которую зажато 6 кранов. В стандартном исполнении плечо у ручки крана составляло 20 мм, возникла необходимость увеличить до 55 мм. Для этого использованы удлинители. В итоге получили: плечо у рулевой машинки 8 мм, у крана 55 мм.


Потом всё устанавливается в ящик, получается что-то такое.

Расчётная часть
Напряжение на выходе с преобразователя (L7805CV) V=5,05 В. Разрядность аналого-цифрового преобразователя составляет n=10 бит (дискретность 1024). Определим дискретность по измеряемому напряжению по формуле:


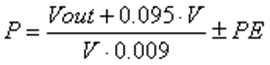
Передаточная функция датчиков давления (MPX4115A) имеет вид:
 – ошибка датчика давления (1,5 кПа), TF (Temp. Factor) – ошибка, вызванная температурой (в диапазоне 0 до 85 оС коэффициент TF равен 1), Vout – напряжение на выходе датчика, V – напряжение источника, P – измеряемое давление.")
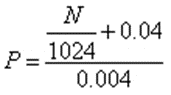
С другой стороны,
:")
Потому, как, для измерения высоты, например, используется изменение давления, то ошибку PE можно не брать в расчёт.
В программу Esato (я так назвал программу) посредством интерфейса RS232 передаются значения напряжений с выходов датчиков. Поэтому, их необходимо преобразовать в вид, понятный человеку (в давление с размерностью).

заметим, что

тогда получим

очевидно, что показание давления не зависят от напряжения источника питания. Аналогично получим формулу для расчёта давления для датчика MPX4250A и MPX5100DP.
Для MPX4250A:
Для MPX5100DP:

Баровысотомер (проверяемый прибор, имеется в виду) оттарирован по параметрам стандартной атмосферы. Для того чтобы можно было задавать значения высоты вне зависимости от сетки стандартной модели атмосферы необходимо получить формульное выражение зависимостей. Для этого в Excel построим график по точкам из таблицы, нарисуем линию тренда и получим формульное выражение для этой линии.

, x – давление (кПа), у – высота, м.")
Для определения скорости одной формулы недостаточно, вследствие сжимаемости воздуха. Поэтому, для расчёта будут использоваться две формулы, на два диапазона скоростей: от 0 до скорости звука, свыше скорости звука. (вообще, надо на три диапазона делить, т.к. влияние сжимаемости проявляется уже 400 км/ч).
Для скорости от 0 до скорости звука:
.")
Для скорости, превышающей скорость звука:

Формула для вычисления числа маха:

Конец первой части.
Во второй части я расскажу о том, как я разрабатывал программное обеспечение на LabView. Этот этот язык программирования выбрал , поотому как у него, как мне показалось, малый порог вхождения. Также покажу как работает установка, как происходит проверка приборов.
 в Android Часть 3. Другие главные циклы")


")